ժҪ������C܇�o��늙C��Ҫ�Ǟ��˱��C���·�������������O(sh��)Ӌ���o���O(sh��)�䣬���Ƿ�Ͷ�빤��ȡ�Q�����·�Ĺ�����B(t��i)����ʹ�ڭh(hu��n)���ضȺܵ͵���r�£��M�����·�����ڠ������Ƅӹ��r�����@Щ�o���O(sh��)�����(w��)�����·����O(sh��)��Ĝ��������ߣ��@���H�����Դ���M���������O(sh��)��ēp�ģ�������ʹ�É�����ͬ�rҲ�a(ch��n)���ܴ�ęCе��늴�����Ӱ푳˄�(w��)���I(y��)�ˆT���������m�ȡ��x��PID���Ʋ��ԣ������͂������頿��늙C�Ĝ����z�y�b�ã���PLC����ϵ�y(t��ng)���Ɔ�Ԫ����HMI��ϵ�y(t��ng)���˙C���棬�����ϵ�y(t��ng)Ӳ�������O(sh��)Ӌ���������ù����O(sh��)ӋPLC��HMI��ܛ�������F(xi��n)������C܇�o��늙C��PID���ơ�
�P(gu��n)�I�~������C܇���o��늙C��PID���ƣ��о�
����C܇�o��늙C��Ҫ�Ǟ��˱��C���·�������������O(sh��)Ӌ���o���O(sh��)�䣬���Ƿ�Ͷ�빤��ȡ�Q�����·�Ĺ�����B(t��i)����ʹ�ڭh(hu��n)���ضȺܵ͵���r�£��M�����·�����ڠ������Ƅӹ��r�����@Щ�o���O(sh��)�����(w��)�����·����O(sh��)��Ĝ��������ߣ��@���H�����Դ���M���������O(sh��)��ēp�ģ�������ʹ�É�����ͬ�rҲ�a(ch��n)���ܴ�ęCе��늴�����Ӱ푳˄�(w��)���I(y��)�ˆT���������m׃������о��_�l(f��)һ�����]�h(hu��n)���ƹ��ܵĿ���ϵ�y(t��ng)������Ҫ�o��늙CͶ�빤���r������Ͷ�빤��������Ҫ�tʹ��ͣ�C���������͂�������PLC��HMI���o��늙CPID����ϵ�y(t��ng)���DZ��n�}���о���(n��i)�ݡ�
�o��늙C������C܇�o���·����Ҫ�O(sh��)�䣬���������������C���՚≺�s�C늙C������ͨ�L(f��ng)�C늙C���Ƅ�ͨ�L(f��ng)�C늙C��׃�����L(f��ng)�C늙C�͝��ͱ�늙C�������C���o���·�ṩ�����Դ�����s�C��C܇�ṩ�L(f��ng)Դ�������L(f��ng)�C�������b�á�ƽ��늿����͠���늙C������s��׃�����L(f��ng)�C�͝��ͱÄt��׃����ɢ�ᡣ�@Щ늙C�Ĺ��ʏ�10ǧ�ߵ�35ǧ�߲��ȣ�������C܇������늙C������ĺ����O(sh��)�䣬��һ�_6�S����C܇�������o��늙C�Ĺ��ʿ��;��_300 kW����ɽ4�͵�8�S����C܇���o��늙C�Ĺ��ʿ�������������Ҫ���ǣ��@Щ���ʺܴ�ĺ����O(sh��)�������ȫ����˾�C�M���˹����Ƶġ����@Щ�o��늙C�У������L(f��ng)�C늙C�Ĺ��ʃH���������C����������C܇�\�а�ȫ�Ŀ��]����߉���ƭh(hu��n)��(ji��)�O(sh��)����(li��n)�i�����Ƅӹ��r�͠������r�ĸ�λ����ʹ�ں���Ķ������ڭh(hu��n)���ضȺܵͣ��o�茦����늙C��ƽ��늿�������׃�������O(sh��)�䏊����s�ĵ���r�£�Ҳ����_�������L(f��ng)�C��Ҳ�����f�L(f��ng)�C�_���ėl���͕r�C���Ǹ���(j��)�����O(sh��)��Ĝ����������əC܇��̎�Ĺ��r�Q���ġ��@�ӵĿ��Ʋ��Դ������@�IJ��㣬�Ȳ��ƌW(xu��)Ҳ����(ji��)�ܣ����ᳫ��(ji��)�ܜp�š���̼��(j��ng)���ɞ�������R�Ĵ��£���(y��ng)����(j��)�C܇���w��r���о�����(y��u)���C܇�o��늙C����ϵ�y(t��ng)���ЬF(xi��n)���Ľ�(j��ng)�����x��
��������C܇�o��늙C���ƣ����ȑ�(y��ng)ԓ���_���ƌ��������������c�Ϳ���Ҫ���о����Ʋ��ԣ��O(sh��)Ӌ����ϵ�y(t��ng)�������_�����w�Č��F(xi��n);�������������o��늙C�У������C�������ǰц���l�����׃������l����늣��������o��늙C����������ǰ��l�������Ŀ������˹����Ƶģ����⣬�՚≺�s�C����(j��)���L(f��ng)�ĉ����ɉ������������ƣ��Ƅ�ͨ�L(f��ng)�C������Ƅӹ��r�r��˾�C���ƣ������Ŀ��Ʒ�ʽ������׃������ͨ�L(f��ng)�C��׃����ͨ�L(f��ng)�C�Ŀ�����˾�C�˹����Ƶģ������Ŀ��Ʋ����д���(y��u)�������Ʒ�ʽ�Ğ�PID���ƣ���������Ŀ����DZ����о��Č���
1 ���Ʋ��Ե��x��
�����L(f��ng)�C�������ǽo����늙C��s��׃�����L(f��ng)�C�������ǽo׃������s����˿��Ʋ��Ե��x��(y��ng)���ܱ��C����늚��O(sh��)��������ɿ���������Ҫ���]��(ji��)�ܣ���ȫ���ɿ��������ǻ���Ҫ��ͬ�rҲҪ������^�ߵ��Ԅӻ��̶ȡ��^�͵ijɱ��ͼ��g(sh��)�������F(xi��n)�����ء��L(f��ng)�C���Ɔ��}�Č��|(zh��)����Ҫ����(j��)���ƌ���Ĝ����ͭh(hu��n)���ضȵ�׃���ƌW(xu��)���������L(f��ng)�C�Ć��Ӻ�ֹͣ��Ҳ���ǿ��ƌ�����Ҫͨ�L(f��ng)�r���ӣ�����Ҫͨ�L(f��ng)�r��ֹͣ�����ǣ�����늙C�������Ƶ����c�����^��Ĝ����ԣ��������^�ߕr�����M��ͨ�L(f��ng)��s�������늙C�ض��^�ߣ�Ӱ푵�늙C�Ŀɿ���������늙C������һ��Σ��������?x��)����늙C�p�ģ��@�N�F(xi��n)��Q��Ƿ�{(di��o)���S��늙C��ͨ�L(f��ng)��s��늙C�ض��S֮�½���������늙C�İ�ȫ�����ضȕr���ٿ����L(f��ng)�Cֹͣ��늙C�Ĝضȿ����ѽ�(j��ng)�ܵ��ˣ�늙C����������Ҫͨ�L(f��ng)���@�֕�������M�����������Ƶ����ã��@�N�F(xi��n)��Q���^�{(di��o)���������}���ǜضȿ���ϵ�y(t��ng)�Ĝ����Ԇ��}��
������������Ҫ�������c���҂��Q������Ŀǰ��(y��ng)���^���ձ飬�������܃�(y��u)����PID���������ơ�PID�DZ����e���ֿ������ĺ��Q������ͨ�^�O(sh��)�����_�ą���(sh��)����Ч��ֹ�ض��{(di��o)��(ji��)�^���е�Ƿ�{(di��o)�ͳ��{(di��o)���@���^������Ŀ������ܡ�PID����������Ҫ����(sh��)�У��y��ֵ���O(sh��)��ֵ������ϵ��(sh��)���e�֕r�g���֕r�g��ȡ�ӕr�g���{(di��o)��(ji��)���^(q��)�ȡ����Мy��ֵ���Ǡ���늙C�Ĝض�ֵ���O(sh��)��ֵ�Ǹ���(j��)늙C�ľ��w��̖�_���ą���ֵ������ϵ��(sh��)��ֵ��һ�ٷֱȣ��ǰ���������(y��ng)ϵ�y(t��ng)��ƫ�ϵ�y(t��ng)һ�����F(xi��n)��ƫ������{(di��o)��(ji��)�����a(ch��n)���{(di��o)��(ji��)�����Ԝp��ƫ��������ô��Լӿ��{(di��o)��(ji��)���pСƫ������^��ı�����ʹϵ�y(t��ng)�ķ�(w��n)�����½����������ϵ�y(t��ng)�IJ���(w��n)�����e�֕r�g���{(di��o)��(ji��)������ʹϵ�y(t��ng)������(w��n)�B(t��i)�`���ߟo��ȣ�������`��e���{(di��o)��(ji��)���M�У�ֱ���o��e���{(di��o)��(ji��)ֹͣ���e���{(di��o)��(ji��)ݔ��һ��ֵ���e�����õď���ȡ�Q�ڷe�֕r�g���e�֕r�gԽ�e�����þ�Խ�����{(di��o)��(ji��)�ؑ�(y��ng)��Խ������֮���e�����þ�Խ�����{(di��o)��(ji��)�ؑ�(y��ng)��Խ�죬����e���{(di��o)��(ji��)��ʹϵ�y(t��ng)��(w��n)�����½����ӑB(t��i)�ؑ�(y��ng)׃�����֕r�g����(y��ng)ϵ�y(t��ng)ƫ����̖��׃���ʣ������A(y��)Ҋ�ԣ����A(y��)Ҋƫ��׃����څ�ݣ�����ܮa(ch��n)����ǰ�Ŀ������ã���ƫ��߀�]���γ�֮ǰ���ѱ����{(di��o)��(ji��)������������ˣ����Ը���ϵ�y(t��ng)�ĄӑB(t��i)���ܣ����֕r�g�x����m����r�£����Ԝp�ٳ��{(di��o)���p���{(di��o)��(ji��)�r�g��ȡ�ӕr�g��ϵ�y(t��ng)�z�y늙C�ضȵ����ڡ��{(di��o)��(ji��)���^(q��)�Ǯ��y��ֵ�c�O(sh��)��ֵ�IJ�ֵС���{(di��o)��(ji��)���^(q��)��ֵ�r��ϵ�y(t��ng)�����{(di��o)��(ji��)���ã����ϵ�y(t��ng)�ķ�(w��n)���ԡ�
늙C�����ǛQ��늙C�~�ȹ��ʺ��~���������Ҫ���أ�늙C�İl(f��)��̶Ȳ��Hȡ�Q��늙C��(n��i)����λ�r�g��(n��i)���a(ch��n)���ğ���������߀ȡ�Q��늙Cɢ��l������ˣ�����M��ͨ�L(f��ng)Ӌ�㣬�Դˁ��O(sh��)�ú����ą���(sh��)�����M��늙C��ͨ�L(f��ng)Ӌ��r��Ҫ�_������늙C��(n��i)���a(ch��n)���ğ�������횵��L(f��ng)��������늙C�ڳ��m(x��)�����¹����r�����^늙C��(n��i)�����L(f��ng)������(y��ng)����늙C��(n��i)���a(ch��n)���ğ�ģ���늙C�t�ڷ��Ϙ˜ʵķ�(w��n)�������¹�����Ӌ��늙Cͨ�L(f��ng)���Ĺ�ʽ��∑��P∞=CBγB��θBQ��ʽ��∑��P∞�dz��m(x��)������늙C�ēp�ģ�CB=1��1�lj�����760 mm�������ضȞ�50 ��r�՚���ܶ�(Kg ��m3)��γB=1000�՚�ȟ�(W·s��Kg·��)��θB�՚�ͨ�^늙C��Ĝ������ɴ�Ӌ��ó�������L(f��ng)���� �� ��
2 Ӳ�������O(sh��)Ӌ
Ӳ�������O(sh��)Ӌ���o��늙C���Ƶ��P(gu��n)�I�h(hu��n)��(ji��)������ϵ�y(t��ng)���O(sh��)Ӌ���ȑ�(y��ng)�M����ό�(d��o)��ȫԭ�t�����Ҫ��ɿ��Ըߡ������S�����Ԅӻ��̶ȸߡ���(j��ng)���Ժá����g(sh��)���M��
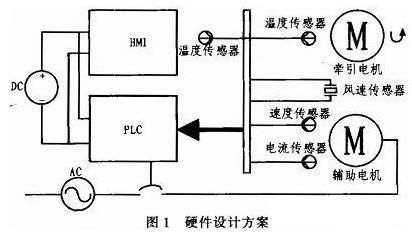
��ϵ�y(t��ng)����ҪӲ��ģ�K�����ɾ��̿�����(PLC)���ضȂ��������L(f��ng)�ق��������ٶȂ�������������������˙C����(HMI)���Դģ�K�ȡ� PLC�鱾ϵ�y(t��ng)�ĺ��Ŀ����b�ã����F(xi��n)�h(hu��n)���ضȺ�늙C�ضȵĶ�·�z�y���L(f��ng)�C늙C�D(zhu��n)�ٵęz�y�͠���늙C�L(f��ng)·ͨ�L(f��ng)���ęz�y�Լ��o��늙C��������ęz�y�ȣ��@Щ�z�y�������̖��PLC��ģ�M��AIO��ݔ�룬��(j��ng)PLC̎���F(xi��n)�o��늙C�Ŀ��ƺͱ��o�����⣬PLC��(sh��)����ݔ��DI�ں͔�(sh��)����ݔ����DO�����o��늙C��߉���ƭh(hu��n)��(ji��)��ݔ���ݔ�����ضȂ������Á�z�y�h(hu��n)���ضȺ͠���늙C�ȵĜضȣ��h(hu��n)���ض���늙C�����ą����c����ɿ��Կ��]���h(hu��n)���ضȵęz�y����Ҫ�z�y��ͬ��3���c����˙z�y�h(hu��n)���ضȵĂ�����Ҫ��3·��늙C�ض�ҲҪ�ÜضȂ������z�y��ÿ1�_����늙C�ضȵęz�yҲҪ3·���z�y����늙C��ͬ��λ�Ĝضȡ����ڠ���늙C�ضȲ����M��ֱ�ӽ��|�z�y������Ҫ���üt�⾀�ضȂ��������L(f��ng)�ق������������ǜy������늙C�L(f��ng)�����L(f��ng)�٣��Ķ�Ӌ�������늙C��ͨ�L(f��ng)���������O(sh��)��PID����(sh��)����Ҫ��(sh��)��(j��)���ٶȂ������O(ji��n)ҕ�L(f��ng)�C늙C���D(zhu��n)�٣����Д��L(f��ng)�C�Ƿ����������Լ������Ƿ�����������������z�y�L(f��ng)�C늙C��������Ԍ��F(xi��n)�L(f��ng)�C늙C���^�����o���˙C����(HMI)�t���F(xi��n)ϵ�y(t��ng)����(y��ng)��������(sh��)���O(sh��)�ã����P(gu��n)��(sh��)��(j��)��ϵ�y(t��ng)������B(t��i)����(sh��)��(j��)��ӛ䛺ʹ惦�Լ����ϙz�y���\����Ϣ�ȵ��@ʾ��PLC��HMI��ͨ����Modbusͨ�ſ����B�ӣ�ͨ�Ņf(xi��)�h��ѭͨ�õĘ˜�Modbusͨ�Ņf(xi��)�h�����F(xi��n)���ߵ���Ϣ���Q��Ӳ���������O(sh��)Ӌ��D1��ʾ��
3 ܛ���O(sh��)Ӌ
ܛ���O(sh��)Ӌ����HMIܛ���O(sh��)Ӌ��PLCܛ���O(sh��)Ӌ��HMIܛ���O(sh��)Ӌ�ǽ����ı��@ʾ������ܛ���_�l(f��)�����O(sh��)Ӌ�����桢����(sh��)�O(sh��)�ý��桢ӛ䛲�ԃ���桢�����@ʾ���漰ϵ�y(t��ng)�������档��������ϵ�y(t��ng)���������r�@ʾ�Ľ��棬Ҳ��ϵ�y(t��ng)�_�C��Ĭ�J�M��Ľ��棬��Ҫ�֠���늙C�ضȡ��L(f��ng)�C����(sh��)���h(hu��n)���ضȺ͙C܇��̖���������o��ϵ�y(t��ng)���ں͕r�g�@ʾ�^(q��)����늙C�ض��@ʾ�^(q��)�������@ʾÿ�_����늙C�Č��r�ضȡ��L(f��ng)�C����(sh��)�@ʾ�^(q��)���@ʾÿ�_�L(f��ng)�C�Į�ǰ�D(zhu��n)�ٺ��L(f��ng)������(sh��)��������ײ��@ʾ�h(hu��n)���ضȺ͙C܇��̖���h(hu��n)���ض�Ҳ�nj��r�ģ��C܇��̖����ϵ�y(t��ng)���������A(y��)���O(sh��)�õġ��������������Ќ��F(xi��n)����������ГQ�������������O(sh��)Ӌ�˅���(sh��)��ӛ䛡�������ϵ�y(t��ng)�Ă����o�������|�������M������(y��ng)�����M�в��������⣬������߀�@ʾϵ�y(t��ng)�Į�ǰ���ں͕r�g������(sh��)�O(sh��)�ý������O(sh��)��PID���������Ԅӿ��Ʒ�ʽ�����ÿ��Ʒ�ʽ���O(sh��)��ֵ������ϵ��(sh��)���e�֕r�g���֕r�g��ȡ�ӕr�g���{(di��o)��(ji��)���^(q��)��ݔ�����ޡ�ݔ�����ޡ�ݔ�����ޡ�ݔ������ϵ�y(t��ng)����(sh��)�Ľ��棬�C܇��̖��ͬ��늙C����̖Ҳ���M��ͬ������(y��ng)��PID�Ŀ��ƅ���(sh��)Ҳ��ͬ���C܇��̖�ڱ��������������ˆ��x��PID��������ÿһ������(sh��)��������ֵ������ֵ��ݔ��ą���(sh��)���������ބt�O(sh��)�ßoЧ��
ӛ䛲�ԃ�����Dz�ԃ�vʷӛ䛵Ľ��棬��ϵ�y(t��ng)�\���^���У����F(xi��n)����늙C�����������ض��^�ߣ��L(f��ng)�C늙C�D(zhu��n)�ٮ�������ͣ�D(zhu��n)���������_·���Լ����ą���(sh��)����r�r��ϵ�y(t��ng)���������¼�����(y��ng)��ӛ䛰l(f��)���Į����¼����ں͕r�g���¼����Q���֏�(f��)�r�g����Ϣ���������ڴ惦���У��@Щ�vʷӛ䛼ȿ����ڱ������в鿴��Ҳ������ֻ�x�ļ�����ʽ�惦��U�P�У���PC���Ì��õ�ܛ��̎������EXCEL��ʽ���ļ��������@ʾ���挍�r�@ʾ����늙C�S�r�g�B�m(x��)׃���Ĝضȣ�1�_늙C����(y��ng)1�l����������������һ�����@ʾ���Բ�ͬ���ɫ��^(q��)�e��ϵ�y(t��ng)���������Á��O(sh��)��ϵ�y(t��ng)�����ں͕r�g�������ܴa���O(sh��)�ú��ġ�
PLCܛ���O(sh��)Ӌ��PLC����ܛ���O(sh��)Ӌ�����������ΈD���̌��F(xi��n)����Ҫ��(n��i)�ݰ���PLC��̖���x���_�P(gu��n)��ݔ��ĞV���r�g��ģ�M��ݔ��ݔ�����������ޡ���(sh��)��(j��)�IJɼ���̎���Լ���PID�������ą���(sh��)�Ԅ��{(di��o)��(ji��)����Ҫ���ܵ��������O(sh��)Ӌ����PLC��HMI��ͨ�Ų��Ñ�(y��ng)�ÏV����Modbusͨ�Ņf(xi��)�h���F(xi��n)��ͨ�Ņ���(sh��)�O(sh��)�Þ飺������19 200���oУ�λ��8λ��(sh��)��(j��)�飬2λֹͣλ�����˝M����ό�(d��o)��ȫԭ�t����ϵ�y(t��ng)���ϵ���r�±��C�C܇������������PLCܛ�����O(sh��)Ӌ�˹����\��ܣ�һ�����F(xi��n)ϵ�y(t��ng)���ϣ�������ϵ�y(t��ng)������ֹͣ������ͬ�rPLC�Ĕ�(sh��)����ݔ����ͨ����(y��ng)��߉�����·���ГQ���əC܇���r�Q�����˹����ơ�
4 �Y(ji��)���Z
ͨ�^�������ƌ�������c��Ҫ���ڝM����ό�(d��o)��ȫԭ�t��ǰ���£����������PID����������Ʋ��ԣ��O(sh��)Ӌ��Ӳ�����F(xi��n)�������քe������PLC��HMI��ܛ����ͨ�^ģ�M�\�У����F(xi��n)����������Ŀ��ƹ��ܡ�
|

��Ϣ")



