



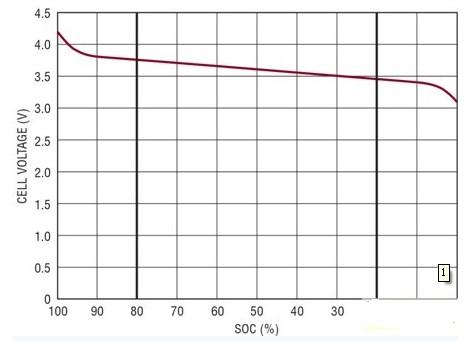
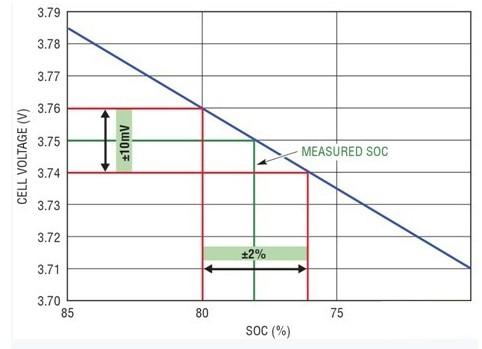
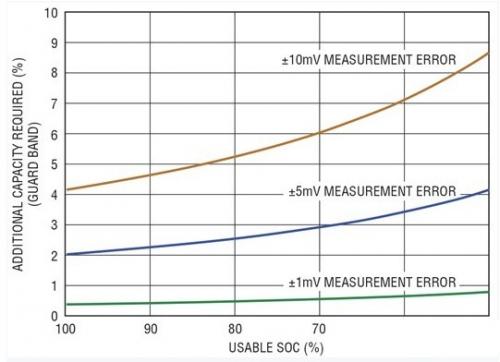
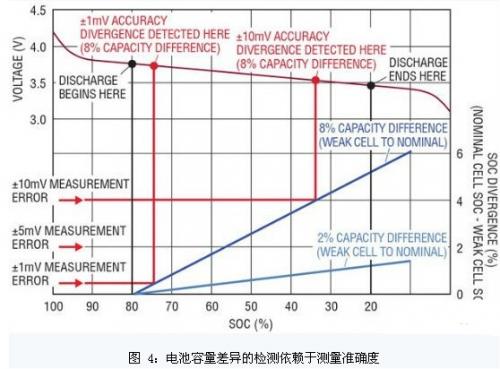
�������r�ǣ�����ƽ�⑪��늳��_��SOC������ĩ�˕r���á����U���@һ�c���҂����Oһ�����ж�߾���������늳��Լ�һ���^������“��”늳ص�늳ؽM��������е�늳ض��������80% SOC���S���늣��t�ǹ���늳ص�SOC���������c����ĸ���늳س��Fƫ�BMS��횴_��һ�����m���c����ʹƽ�����܉�������늳��^�m��늵�ͬ�r���ǹ���늳ر������\�Р�B���D4ʾ���˷�������е�SOCƫ����r�����e�˃ɂ����ӣ�һ��������һ��늳ص������c늳ؽM����늳����2%��������һ�������Єt�����8%.BMS늳y���`���O����һ�����ڴ_��늳�֮�g������B����ֵ����SOC�y���`���±2% ��±10mV���r����늳y���·�ɿ��ؙz�y���@һ��r֮ǰ늳ر˴�֮�g��늺�ʧ������п����_��4%.������߂��h�h����±10mV��늳y���ʴ_�ȣ���ôҪ���@�l���������ij�����_���x���c�ό��Fһ������ƽ���������Dz����ܵġ�
�y���ʴ_�ȵ����x��������������ƽ�⡣��ԓ����֪��4%��SOC����D����һ�����^6.6%������׃�������������½�20%֮���_�������ĩ�ڵ���܇늳ض��ԣ��@�����ش�IJ��ɻ֏�����������Ҫ���ǣ�늳�������׃���Ƿ�ӳ�佡����r��һ��P�Iָ�ˣ���δ���X������׃���t�п�����һ�����صĆ��}��
�����]�@��������������ď��s��r�r��늳y���ʴ_�ȵ���Ҫ�Ծ�׃�ø�������ˡ����磺�����늳ؽM�������B�m������׃���������и��Ӽ����y�ԙz�y��SOCƫ����ң�늳����_ʼ��늕r��̫���ܶ�̎��80% SOC��������S���Mһ�����w������׃�������⣬��ע�SOCӋ����Ҫ�����������@һ�cҲ�Ǻ���Ҫ�ġ��@Щ���������Ĝy���`�δ�p�͌��ڜʴ_늳�늉��y����Ҫ���෴������늳y���ʴ_�Ȍ��ܿ���չ��늳؉����ķֲ���
늳رOҕ���Ȳ���늉������ǜy���`�����Ҫ�Q�����ء�늉������е��κ�׃������ֱ�ӌ���늳y���ʴ_�ȵ��½���Ŀǰ�@һ��늳رOҕ���������ǎ�϶늉����ʡ���Փ���v����϶���ʷdz��m�������ϵ����s�ļ����·�����磺늳ؽM�Oҕ����֮�У��������ֻ��O�ٵ�оƬ���g�����ʺ͵�ԣ��늉���Ȼ������϶���ʌ��ڙCе������IR�������͝�Ⱥ����У�����������t�����L��Ư�ơ�������Щ��Ҫ��15�����ϵĕr�g�ﱣ�ַdz��ߜʴ_�ȵĸ߾��ȃx������һ�N���õ��x�����µ�늳رOҕ�������磺�������ص�LTC6804��������һ������ʽ�R�{늉����ʡ�����ʽ�R�{늉����ʿ��������r�g�����l�����ṩ��ɫ���L�ڷ����Ժ͜ʴ_�ȡ��\���@�N������LTC6804�܉��Cһ������1.2mV��늳�늉����y���`�
늳رOҕ���Ĝʴ_�Ȳ��������ڜy�������Ĝʴ_�ȡ����茦��܇�h����늳y�����Կ��]���@���������������׃�������������_�P���^�����������������˲׃�������Ƕ����늳���̖֮�ȣ�������ҕ�ʴ_�ȵĈ����б������ԓ����ͨ�^��ÿ��늳��ϲ��Oһ��RC�V�����Ɍ��F�m�ȵĽ��룻�����ڳɱ����·����g��ԭ����ÿ��늳���ʹ��һ���^���A�ĞV�����·�Dz��Ќ��H�ġ�ͨ�^������ÿ����̖�y���Ķ����ӱ��M��̎�������������m���������b��늳ؔ������࣬���茢��������������һ������̎���������ʹ���@�N����ͬ�Ӳ��߂䌍���ԡ�һ�N���ö���Ч�Ľ�Q����������늳رOҕ���Ȳ����������磺�������ص�LTC6804�����˾߃������A���V�������·������-�ۼӣ�ΔΣ����ADC.�@һ�c�c����SAR ADC�ǽ�Ȼ��ͬ�ģ����ߵĿ��ٲɼ����ڱ����p�ĵ���̖�䔵ֵ���ޡ����˃����ٶȺͽ������ܣ�LTC6804��ΔΣADC�ܲ��ò�ͬ�Ĺս��l�ʣ�������27kHz��26Hz���\����������܇�h�����ԣ�����ΔΣADC�ķ������ஔ��Ч�ġ�
�S������늳�ϵ�y������������aƷ�~�M������늳رOҕ��ӮaƷ������Ҳ���������С���܇ֻ���ṩ���ᐺ�ӵ�ʹ�íh����ͬ�rҪ��M���ܸߵ������c�ɿ��ԡ����ˌ��F�����������̡��ɿ��ԺͰ�ȫ�ԣ��ͱ������ܵؿ��]������ܓpʧ��ÿһ�N�����۵�Դ�^�������@ȡ���еĿ�����ܣ��t��Ҫ�\���T��늳�늺�����ƽ��ȼ�˼��g�����⣬߀��Ҫ��ʩ�M���ܜʴ_�ͷ�����늳�늉��y����

