����: Maksim Apanasenko, Boaz Kramer, Ze'ev Kirshenboim.
ACS Motion Control
��B
�S��I����, �댧�w���A�z�y�yϵ�y, �ЙC�l����O��ƽ���@ʾ�����a�͙z�y��,�@Щ����Ҫ��O��ߵ��\�����ܣ��ڵ��ل����\�ӵļ{���\���б��ց��{�����oֹ���Ӻ��S�`�Ŀǰ�����ŷ����ѽ��������ڝM���@Щ�����@�N��͵������ṩ���@�˵����ܣ������_���@Щ������Ҫ�ľ��Զȡ��������ھ����ŷ�����Ч�ʵͣ���p�Ĵ��w�e���ء���һ��450mm�댧�w��Ŀǰ��300mm�댧�w��ö࣬�����@�ӵ�ϵ�y��Ҫ�������и��ߵ����������ߵ�늉���������@��Ҫ���������w�e�dz��������������ޣ�����������@��ϵ�y�����ܺ����a����������ϵ�y�ɱ���������ϵ�y�ɿ��ԡ�
NanoPWM���_�PPWM�����ľ��Ի����@�N���Ի�����һ�N���صČ������g��
���^ȥ5����ACS�аl��PWMBoost���ԝM���@�ӵ�λ��ϵ�y��NanoPWM�����ṩ���õ�λ�����ܺ��S���ܣ����ҿ˷��˾���������ȱ�c��NanoPWM�dz��o�����и��ߵ�Ч�ʺͿɿ��ԣ������ṩ���ߵ�������������Դ�����Ҹ�������
�ŷ������ķN�
�ɷN��Ҫ���ŷ������������������_�PPWM������
�D1���L�˾���������ԭ����D���@��������һ����׃���һ�ӹ�����������������ؓ�d�迹�{����������늉����������R�_������֮ǰ�����R�_�Ե����\�б�Ҫ���ṩ�����ؕr��������Ǹߵģ������R�_�ϵ�늉����ǵ͵ģ����������ϵ�늉����Ǹߵġ��˕r�����ēp���Ǻܸߵġ�
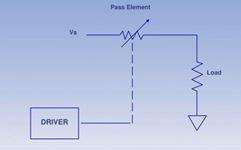
�D1����������ԭ��D����
�D2�������_�PPWM�ӵ�ԭ��D��D����������ͨ���_�P�������R�_����ƽ������ľC�ϼ��ɡ�ƽ��������_�Pռ�ձȵľ��Ժ���������o���r���_�P�����ǔ��_�ģ��]��������^�_�P�������nj�ͨ�ģ��е�늉������_�P�ϣ�������_�P�p���Ǻܵ͵ġ�

�D2��PWM������ԭ��D����
.
��1.���N��������ă�ȱ�c���Y
��1�����N�����ă�ȱ�c

����

��3-�댧�w���A�{�D
�댧�w���A�z�yϵ�yҪ�{�����oֹ�`��ͼ{�����S�`����죬�����ϵ�y�Ǟ���̎��ֱ��300mm �ľ��A����һ�����A��ֱ�����_��450mm���@Ҫ����ͬ�ӻ��߸��õ�λ�ÿ������ܣ����ڳߴ�����������҂���Ҫ������R�_�����������ֺ����ϵ�y�����������@�ӵ�ϵ�yҪ���������о���������PWM�ӵă��c��NanoPWMTM�����@�ӵ����������ܸ�Ч�����Ԍ��F��늉��������ṩ����������ܾo�����ҳɱ����͡�
�D4��5��B��NaonPWM����Ҫ���c��
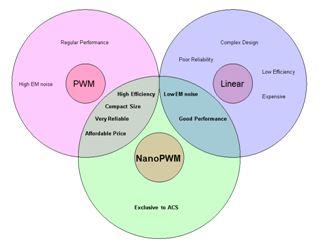
lowEM noise :��늴���
good performance�����õ�����
High efficiency������
Compact size���Y���o��
Very reliable���dz��ɿ�
Affordable price���ɽ��ܵărλ
Regular performance��һ������
High EM noise ����늴���
Complex design���OӋ���s
Poor reliability ���ɿ����^��
Low efficiency��Ч�ʵ�
Expensive����r��
�D4-NanoPWM�����˾���������PWM�����ă��c

�D5-��ͬ���ʵľ���������PWM�����ijߴ猦��
���ܱ��^
�yԇϵ�y����һ���o�N��ֱ���R�_���ӵ�ֱ��ƽ�_������L���S�ЙCе�ͻ����ֱ��ʞ�0.4mico-meter��magnascale����ģ�M��SIN-COS���a�����\�ӿ���ϵ�y����ACS MC4U����ģ�K�����N��ͬ������
• NanoPWM
• Standard PWM�˜�PWM����
• Standalone linear drive�Ϊ���������
��ÿ���yԇ�У��������㷨���M��һ�����{ԇʹ���_������ܺ����ƵĎ�����
���2������������������ͬ������

Table 2 �C ��������Ҫ����ָ��
�yԇ��������ָ�ˣ�
�oֹ����
���ٸ��S�`��
�oֹ�`�NanoPWMvs��������
�yԇ�Y���ڱ�6�У����Y�ڱ���3��
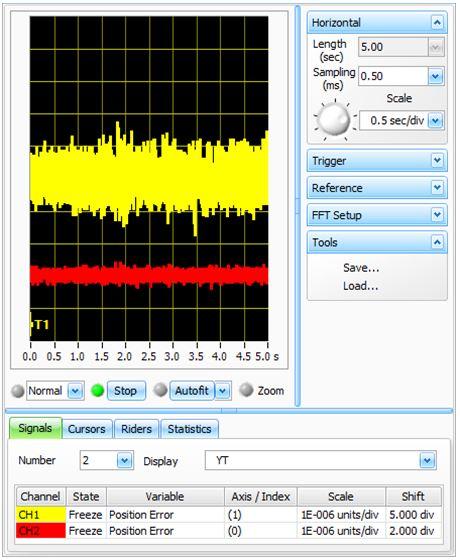
��6 �CNanoPWM���tɫ��VS�����������Sɫ���oֹ����

Table 3 - NanoPWM (�tɫ) VS �������� (�Sɫ) �oֹ����
ʹ��NanoPWM������ʹ�þ��������r���oֹ�������@�pС��С4.5����0.8nmVr3.6nm��
���ٸ��S�`��-NanoPWM VS��������.
���S�`������1mm/s���ٶ��y���ģ��yԇ�Y���ڱ�D7�У����Y�ڱ���4��

�D7 NanoPWM�������tɫ��VS�����������Sɫ���ĸ��S�`��
NanoPWM ��������

Table 4 - NanoPWM (�t) VS�������� (�S) ���S�`��
ʹ��NanoPWM�����r���S�`�����@�pС���Y���õ���ƽ�����\��܉�E���@�ӵ�܉�E�ھ��A�z�y�^����ʮ����Ҫ��
�oֹ�`��-NanoPWM VS�˜�PWM����
�yԇ�Y��Ҋ�D8����5�M���˿��Y

�D8-NanoPWM���tɫ��vs PWM���Sɫ���oֹ����

Table 5 - NanoPWM (�tɫ) VS PWM drive (�Sɫ) �oֹ����
ʹ��NanoPWM�������oֹ�`���ʹ�ؘ�PWM����С�ɂ���������ƽ���@ʾ���ӹ�ϵ�y���^�������R�_늉��������Ҫ���^��Ŀǰ�̘I���˵ľ����R�_�����S�������ЙCLED�@ʾҪ����ߵľ��_�ȣ����S���Ⱥ��oֹ���ӣ���Ҫ�ڎׂ��{���`����ȡ�NanoPWM�o�@�ӵ���������˽�Q������
���Y
���Ľ�B��һֱ���͵ľ����_�P�ŷ�����-NanoPWM,�@�N�������о���������PWM���������Ѓ��c��ʹ��NanoPWM�����õ����\�����ܳ��^��Ŀǰ�ѽ��̘I���˵ľ����ŷ����������ܡ��@�N������С�����ɿ��������ˡ�
�@�N�������ԝM����ߵ��\�����������m�ϰ댧�w���A�z�y��ƽ���@ʾ������ϵ�y�� |





