| ��܇��������VCU����늄���܇�Ĵ��X���ஔ����X��Windows���֙C��Andrio������늄���܇��ȫ��늚���\��ƽ�_���������܃��ӣ�ֱ��Ӱ�����늚����ܵİl�]������܇���ܺÉĵěQ��������֮һ��
1 �M��
�Y���M��
VCU���Y���ϣ��ɽ��ٚ��w��һ�MPCB��·��M�ɡ�
Ӳ���M��
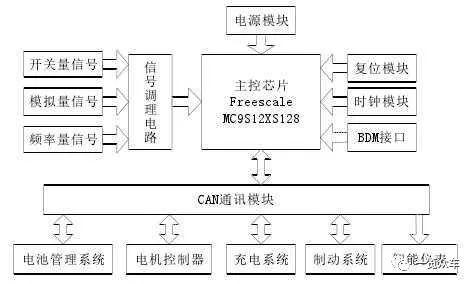
������������оƬ������߅�ĕr��·����λ�·���A���ӿ��·���Դģ�K�M����Сϵ�y��
����Сϵ�y���⣬һ��߀��䔵����̖̎���·��ģ�M��̖̎���·���l����̖̎���·��ͨӍ�ӿ��·������CANͨӍ�ӿں�RS232ͨӍ�ӿڣ�

2 ��늚��cVCU֮�g�����ӹ�����
һЩ���ڱO�y܇�w������B����̖����܇�d�����б��^��Ҫ���_�P��̖��ģ�M��̖���l����̖���ɂ�����ֱ�ӂ��f�oVCU������ͨ�^CAN������
늄���܇�ϵ��������Ъ���ϵ�y��늚⣬һ��ͨ�^����CAN�����ķ�ʽ�M����Ϣ���f��
2.1 ֱ�ӂ��f����̖��
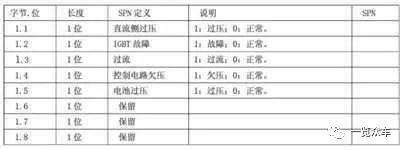
�@�����f���_�P��̖������耳���̖���nλ��̖������_�P���Ƅ���̖�ȣ�
ģ�M��̖һ���У�����̤����̖���Ƅ�̤����̖��늳�늉���̖�ȣ�
�l����̖������܇�ق�������늴���̖��
ݔ�����_�P��������늳ع�늻�·�ϵĽ��|�����A���^�������һЩ܇���ϣ���VCUؓ؟���ơ�
2.2 ͨ�^CAN������늚��Ԫ
CAN�����ϵ�ͨӍ���c�ߵ�λ�������ģ��S�r�S�����l����Ϣ����Ϣ֮�g���Ⱥ�����ɰl����Ϣ�ߵă��ȼ��_�������ȼ���ͨӍ�f�h���ѽ�����Ҏ����ÿ�l��Ϣ�ﶼ�аl���ߵĵ�ַ���a��
ͨӍ�е���Ϣ���a������������ͨӍ�f�h�������_Ҏ�����l�l��ʲô�ӵĴ��a�ṩ��Щ��͵���Ϣ����Ҫ�����ǹ����p���ļs����������������е�늚��Ԫ��ַ���a�����ǁ���һ����܇�S�cVCU�����̵ļ��g�f�h��

CAN����ӛ䛣��ǾS���{ԇ�ˆT��õ�С���֡��D��ͨӍ�f�h�Ќ����ϴ��a��Ҏ������Ҋ�Ĺ�����Ͷ�λ�����У�ֻҪ���Յf�h����Ҷ������x������ӛ��ˡ�
���^������dz�Q����P��ϵ�y������ͨ���Եď�������ͨӍ�f�h��Ҫ�yһ���Ї��Ҙ˜����Խyһ���a���������e�����P���ˣ���
2.2.1 VCU�c����늳�ϵ�y
����늳��Ǽ�늄���܇������Ψһ��Դ��VCU�c늳ع���ϵ�y��BMS��ͨ�^��܇CAN�����M����Ϣ������
����늳ذ����r�O�y���ψ�oVCU�������������������늉�����߆��w늉�����͆��w늉�����ߜضȣ�늳ذ���늠�BSOC��State of Charge����ijЩϵ�y߀�O�y늳ذ�������BSOH��State of Health����
VCU�l�ͽo늳ذ������������늣���늺��_�Pָ�
��늣�������ij���B����̖�_�J����܇̎�ڽ�ֹ��܇��B��VCU�������ƙࡣ��������^����늳ع���ϵ�y��BMS���ͳ�늙C��ͬ��ɣ�ֱ�������ɻ��߳���Д࣬܇�v���ƙ����»ص�VCU���С�
��늣�VCU�����{�T��D�������܇�v�Ĺ������Q���������l�ͽoBMS��BMS��������SOC���ضȺ�ϵ�y�OӋ�ֵ���_���ṩ�����ֵ��
�������ϵ�y��Ҫʹ��늳ذ�������YԴ�r����Ҫ늳ذ��cVCU�f�{̎�������^�̣����牺�s�Cϵ�y����sҺѭ�hϵ�y�ȵ��_���P�]�����������^��ֻ�漰늳ذ��Ȳ�늚⣬�����_�����õ�PTC���ӟ�Ĥ�ӟᣬ�����_���L�Ƚ��أ��t��Ϣֻ��늳ذ��Ȳ�̎�����ɣ�����Ҫ�cVCU��ͨ��
�_�Pָ��ڳ����_ʼ֮ǰ��VCU������܇���ϵ�y�Ƿ���늣�ͨ�^����늳ذ�������·���|�����F����܇�v�\���^���У�����ͻ�l��r��VCU�����Д��Ƿ��]�ϻ��ߔ��_����·���|����
2.2.2 VCU�c늙C���������
VCU��늙C�������l�͵�ָ������������ֵ�������늙Cʹ����Ϣ��늙Cģʽ��Ϣ�������Ƅӣ������ӣ������ӣ��Լ�����ģʽ�µ�늙C�D�أ�
늙C��������VCU�ψ�늙C�Ϳ������ĸ��N���������ψ���Ϣ����Ҫ��������늙C�D�٣�늙C�D�أ�늙C늉��������
2.2.3 VCU�c���ϵ�y
���ϵ�y����܇�d��늙C����܇�d��늙C���V�x��߀�����Q�ϵ�y����Q�ϵ�y���@��ġ��䡱��Ҫ��ָ��܇�d��늙C�����������ͨ���ԵĿ�������Ҫһ�yһ��ͨӍ�f�h�����Ї��˶���Ŀǰ�����°汾��
GBT 27930-2015 늄���܇��܇�d����ʽ��늙C�c늳ع���ϵ�y֮�g��ͨ�Ņf�h
GB�MT 32895-2016 늄���܇��Q늳���ͨ�Ņf�h
GBT 32896-2016 늄���܇�����}����ͨ�Ņf�h
�˜ʽyһҎ���˳�����̣��������w��ͨӍ���a��ͨӍ�Z��ă��ݡ�
�Գ�늘��c܇�v�ϵij�늽ӿڵ������B�Ӟ��_�ˣ���������^���е���Ϣ���Q����늳ع���ϵ�y�ͳ�늙C֮�g�M�У�����ͨ�^VCU��
2.2.4 VCU�c�Ƅ�ϵ�y
���Ïͺ��Ƅ�ϵ�y��늄���܇����Ҫ�C�Ͽ��]Һ���Ƅ�ϵ�y��늙C�ƄӺͷ�����ϵ�y��ABS���ąf�{һ���ԣ��M����Ҫ���Լ��Ĺ���ϵ�y���Q���Ƅӹ���ϵ�y��BCU����BCU���Ԫ�����VCU֮�⣬ֻͨ�^CANͨӍ��Ҳ���ѹ��ܼ��ɵ�VCU�Ȳ���
�����Ƅ�̤����_�Ⱥ��_��׃�����ٶȣ�VCUӋ���܇�v���Ƅ��������أ����f�oBCU��BCU����܇�v�ľ��w��B�������w���ط��䡣
܇���еȵ�һ���Ƅӣ�ֱ������늙C���������Ƅӣ���������Ļ����Ƅ�������
܇�ٸߣ��{�T����̤�壬��Ҫ�o���Ƅӡ��tBCU�����Ȇ���Һ���Ƅ�ϵ�y�����p�٠�B�����Ժ����������������Ƅӣ�����u�Ӵ������
����ڱ�ѩ·�棬BCU�t������ABS�������䃞�ȼ��O�Þ���ߣ���܇�v������ȫ����Ҫ��
2.2.5 VCU�c���܃x��
늄���܇�x���P���Y�ς��y܇ԭ���IJ��ã�����GB/T 19836-2005 ���@ʾ���������Ҫ�����±���ʾ��
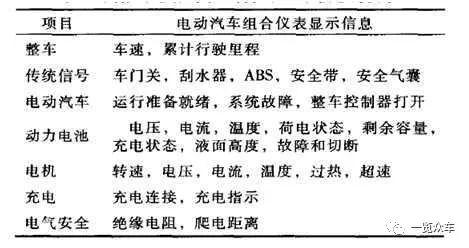
���܃x�����߶˺͵Ͷ˵�ԭ��^�e���^���҂�ֻ������һ�N��ʽ������
�x��ϵ�yͨ�^CAN�����cVCU���B����VCU�@ȡ��Ҫ�@ʾ�Ĕ�����������ݔ�M�x���������Ժ���̖̎���·������Ϣ߀ԭ�ɸ����x�����@ʾ���ݡ�
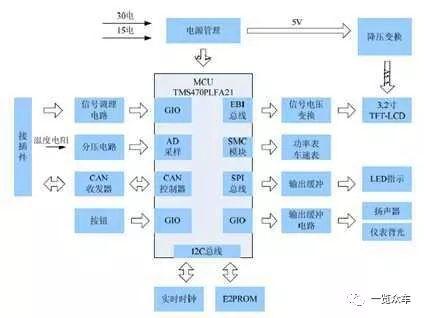
��һ����ָ�ʽ�x������Ҫ�Բ��M늙C��ý�飬�ѫ@�õĔ����D�����ӱ�����D�Ą����������Mһ�c��Һ���@ʾ�����t����Ҫ�Ӳ��M늙C�@���^�̣�ֱ��ͨ�^��Ϣ̎�����������@ʾ���ό��r�@ʾ��������һ�����܃x��Ӳ���OӋ��D���H���@�ø����J�R��
3 �����rԔ��
VCU����܇�v�ĺ��ģ����ƺͱO�y��܇�v��ÿһ��������܇�v�Ŀ����^�̣�����ᘌ���ͬ���\��ģʽ�����P�еĎׂ������M�б��^�����������Ă���������܇�͈������ӵ��\��ģʽ��
܇�v����ģʽ��һ��Ą��ַ����ՙnģʽ��������ģʽ���Ƅ�ģʽ��ʧЧ���oģʽ����ģʽ�ͳ��ģʽ��
���水��܇�v�IJ�ͬ�\��ģʽ�������v�����Ĺ����^�̡�
3.1��ģʽ
�@��ģʽ������Ҫ���c�ǣ��M����ģʽ�Ժ����܇�v̎��ˮƽ·�棬�t܇�v�����^С���ٶ��_ʼ��ʹ�����܇�v̎��б���ϣ��t܇�v���ٕ��S��סԭ�ز��ӵĠ�B���@����ģʽ�������OӋ��ԓģʽ�£����ز�̤����̤�壬늙C�Ԅ�ݔ��һ�����A�D�أ���ֹ��܇��
3.2������ģʽ
ָ܇�v̎�������\�Р�B���������٣��p�٣���܇���@���^���У�VCU���m�O�y����늚�ϵ�y�����늉����ضȵȅ������Լ�܇�v������܇�٣������ʵȵ���܇�������R�e�{�T��D�����ռ���̤����_�Ⱥ��_��׃���ʣ�Ӌ��늙C�����D�غ�늳ص�ݔ�����ʡ�
3.3�Ƅ�ģʽ
�Ƅ�̤�屻���£������Ƅ�ģʽ��VCU�����Ƅ�̤����_�Ⱥ��_��׃�����Լ�܇�٣��Y��܇�v������܇�ͅ����������Ƅ����ء�ָ�]�Ƅӿ�������������������Ƅ����ط��䷽�����ṩ�Ƅ����ص����w����Һ���Ƅ�ϵ�y��늙C�����Ƅӣ����Լ��Ƿ��Ȇ���ABS�����Ƅ��^�̡���ȫ��Ч�Č��F�{�T���Ƅ���D��
3.4 ʧЧ���oģʽ
늄���܇�\���^���У���ϵ�y�ȳ��F�Ĺ��϶��x�Ɏׂ��ȼ���
���ϵȼ���͵ģ�һ��ֻ����ʾ�{�T������늳ض��_��50��C��
���ϵȼ���ߵģ�������܇�v��һ�����^С�ĕr�g��ͣ܇������z�y����ϵ�y�^�����ϡ�
������֮�g�Ĺ��ϣ���������ͣ܇��������܇�v���\�Р�B�M�����ơ�����늳����SOC����30%���������˕r�Ą���늳�ϵ�y���ѽ��o��ݔ���~�����ʣ���ֻ����һ���^С�Ĺ��ʹ�����
3.5 �ՙnģʽ
늙C�c܇�v�Ă���ϵ�y֮�g�]�ЙCе�B�ӣ�늙C̎�ڑҿՠ�B����������ݔ���κ��D�ء�
3.6 ���ģʽ
��늘��c܇�v��늲��������B�Ӵ_�J���o���Դ��늣���l�����ֈ��IJ���ɽ^���z�y��
������ɣ��M�Ѕ����_�J����늙C�l�ͳ�늙C���ݔ���������ģ�BMS�_�J���Ƿ���������������늣������ɣ��t�l��늳ذ���������������
�M����ʽ����A�Σ��ڴ��^���У���늙C��BMS���r����l�͠�B��Ϣ��BMS�����l��������
��늽Y�������Єe�l������BMS�IJ�ͬ�O�ö�������ͬ��һ��������������㉺�A�Σ����˥�p��һ���O��ֵ�����O���ı��ʣ����J��늳ذ��ѽ���M������^�̿��ԽY����
�^���У��κ�һ���l�����ϣ������^�ء��^���ȣ���늙C�����l�����������ϵȼ��IJ�ͬ���е�ֱ�ӽKֹ���еĵȴ��˞�̎����
5 �_�l�^��
����܇�ИI��Vģʽ�_�l�ѽ���һ�����J�ĸ�Чģʽ��VCU���_�l�^�̣�һ��Ҳ����ѭ�@���^�̡�������һ��ͨ�õ�Vģʽ�_�l���̈D��
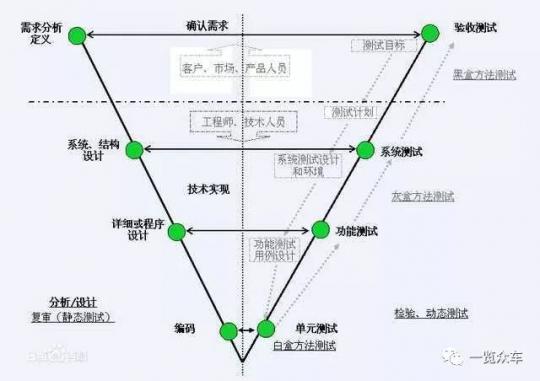
Vģʽ�_�l�����������ͨ�^�fͬ������ʹ��ܛ���OӋ�_����Ч�c���|��õ�Ŀ�ġ�ģ�͵�ˮƽ�����{��C�ļ��r�Ժ��m���ԡ�ͨ�õĽ��ڡ�V���ֵ������棬���^���A�Ĺ��������ðМyԇ��Խ���ϣ�ϵ�yԽ���s���A������ںМyԇ�^�ȡ�
���w��܇���������_�l�^�̣�
���ȣ������្�����������Wģ�ͣ����M��ģ�ͷ��棻
Ȼ��ģ�͔������d������ԭ���У���Ӳ���ӿ����ԭ��ģ���е�߉�ӿڣ�
��һ�������Ì��Iܛ��������C���a���c�ӳ��ɺ�ͨ�^�ӿڳ������d����܇������Ӳ���У��ʂ��M���{ԇ���@���^���У�ÿ������ģ�K���քe�M���{ԇ��
������Ӳ���ڭh����yԇ������ģ�M��ģ�M܇�v�\�Эh������VCU�M�й��ܜyԇ��
���VCU�b܇����܇�y�u�����ͨӍ�f�h�˶����y�uͨ�^�õ��aƷ�ĵ�һ���档
6 ��Ҫ�S��
��늄���܇��܇��������������܇����㲿�����^�LJ���S�����w���� �������ꑡ��������F�ȡ�
���ȣ��Ծ�Ҏģ��܇���A���������аl��܇����������ȁ��ϡ��L������������ͨ�������ȣ������Լ����ס������������ҪVCU������߀��һЩ늙C�S�ң������늙C������늙C���R�����g�ȡ�
��܇������������оƬ���ܺ�ϵ�y���ɶȣ��LJ��ȏS���������ܵ���Ҫƿ�i�� |





