������Ҫᘌ��O�����������P�ˆT�����Ŀ�������Cе�OӋ��늚⡢ܛ���\�ӿ������̎����v�����M늙C���ŷ�늙C�����Ķ�ָ����ͬ�������ŷ�늙C�������ã��x�÷�������߅�����Oʩ���x�����Ҫ���ý�
1 ���M���ŷ�늙C�ĸ������c����ȱ�c��B
1.1 �ɷN늙C���cλ���ƻ��{�ّ��õĽ�B
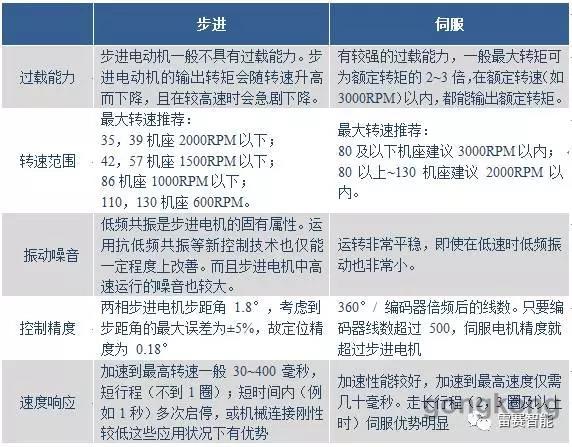
���M���ŷ�늙C��Ҫ���ھ��_��λ���ϣ�Ҳ�����������{�ّ��á����M늙C��Ч�ʵͣ�һ�㲻��������ã������һ�����D���}�ӣ������]�����D�ؿ��ơ��ŷ�ϵ�y�t�������D�ؿ��ƣ�߀�ɿ��]ȡ��׃�l�Ӯ������á�
���M늙C���{�ّ��Õr������ָ��ͨ�����}�_ָ�����׃�}�_�l�ʁ��{�١�����׃�l���{�٣��е������ش����ڿ��Ɔ�ͣ���Ӝp�ٕr�g�̵ă��ݣ����m��늉���ؓ�d�l���£��ٺ��뼉�����_��Ŀ���ٶȣ��������{�ٷ����^������ؓ�d�T����ƥ������ėl���£�ͨ������Ҫ���Ӝp�ٙC����ȱ�c�����\������������һЩ��
�ŷ�늙C���{�ّ�������׃�l�{�ف��fҲ�мӜp�ٕr�g�̵ă��ݣ�ͨ����������ʮ��������_���A���ٶȣ��{�ٷ��������������{�١��D�ؿ��Ƒ��Õr��������̖���h��ģ�M��늉���̖��
1.2 ���M���ŷ����������c�����ȣ�
2 늙C�x�ͼ����ý��
2.1 늙C���x�ͷ���
�O����������늙C�x�͕r���Ʌ������·�����
1��ʹ�íh������Ҫ�ķ��o�ȼ����\������ָ�ˣ�����ָ�˵ȣ�
2���_���CеҎ��ؓ�d�����Եȅ�����
3���_�J�����������D�١��г̡��Ӝp�ٕr�g�����ڡ����ȵȣ�
4��Ӌ��ؓ�d�T�����x��늙C�T����
5��Ӌ��늙C�����D�أ�
6���x������D���ܝM�㑪��Ҫ���늙C��
�O�����������P��λ�ˆT�������·ֹ������@ȡ�@Щ��Ϣ--
�Ŀ����
Ԕ���˽��O�����a���aƷ�Ĺ�ˇ�����íh�����m�íh�أ����ȣ��a�ܣ��Cе�Y�����ɱ��ȅ������M���_������늙C������ָ�ˡ����o�ȼ������Ü؝�ȡ�������ˇ���a�ܡ����µĽY���������ܵõ�ÿ��늙C���г̼�ÿ����������ĕr�g�Ƕ��٣��M���_��늙C������D�ٷ���������������B���ȼ����h���ٶȷ�����ֵ�����_���x�ŷ�߀�Dz��M�ķ����ԡ�
�Cе�OӋ�ˆT
�ڙCе���ӡ��Y�����OӋ֮ǰ�����Ȍ��ŷ����M늙C����̖Ҏ����Ԕ�����˽⣬����늙C�ИI���P�˜�Ҏ��ߴ���OӋ����t���OӋ�Â��ӡ��Y�����ف��x늙C�����������������b���g���]�������S�����S�L�Ę˜�늙C���]������Ĵ����ء����m�T����늙C�Ȇ��}��Ӱ��M�ȣ�̧�߳ɱ���
��ע
���õĿ����늙C�������ŷ������M���D�����һ���50 NM (ţ��)����ِ�T�����IJ��M늙C��̖��130HS45���T���飺4.84*10-3(kg��m2)�����M늙C�S�������m�P�����w�̶���λ�ߴ磬�ֶ��ǰ���Ӣ�����T���ŷ�늙C�ߴ�һ�㶼���չ������T��
�Cе�OӋ�ˆTҪ��Ӌ���\�Ӳ������D�ӑT���M����Ӌ���������ء�
2.2 ���ý��
1��늙C�cؓ�d�g�����b���ӡ�
2����ע���ӡ�늙C��ɢ�ᡣ
3���x���������Դ�������O����������֡�
4�����_��늚��B�ӣ�������늚��b�乤ˇ��
5���OӋ�������\��������
�±��քe���O�����������P��λ�ˆT��Cе���̎���늚�̎���ܛ�����̎��ṩһЩ����
�Cе���̎�����
늚�̎�����
ܛ�����̎�����
�D1
����������̖�Ӿ��Dעጣ�
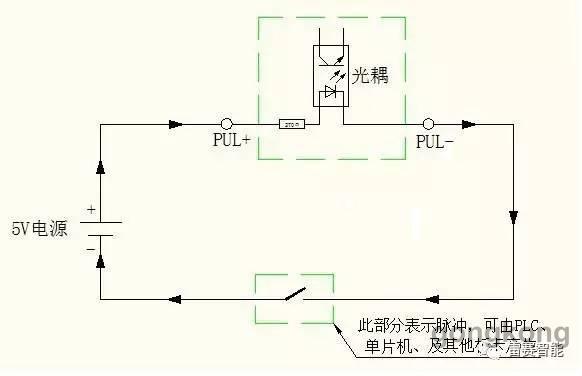
1���}�_��������̖�˽Ӿ�ԭ��D��������M����������̖늉����ȗl�����ٿ��]��λϵ�y����̖ݔ����ͣ������ɷ֞飺����͡�NPN�ͣ�©��������ͣ���PNP�ͣ�Դ��������ͣ�
2�����^�鳣Ҋ��NPN��ݔ����̖�����f�����o�oץס��·�ĸ���������̖�Դ����������PUL+���Ȳ��·���PUL-���������ٽ��^��λ�������}�_ݔ������������ؓ�ˣ�NPN��PNP���}�_ݔ���ڵ���ؓ�˶�������Ɇ���ͨ�_�P�����ُ��}�_ݔ���ڵ�ؓ��������̖�Դ��ؓ�ˣ���D1�γ������Ļ�·��
�����ݔ���^�����⣻ͨ������һ���ó������ܮa����������ܮa������������Բ��ܰю�·�����̖�ġ�ͬ���ˡ�����һ���γɹ�ꖻ�ꎽӷ����oՓ��λݔ������ͺ�������̖�ӿ���ʲô��ͣ�ֻҪ���γ����������_�P�Ļ�·���С�
3����Ոע�⮔��̖늉�����5V,�������������r�������c�}�_�Ļ�·�ж����и��Ե�����������Ҫȥ����һ����衣
4���鱣�C������늙C���������������h����ָ����Դ���������и���ؓ�d���Դ��ȫ���x�������ܸ��x��Ո�ձ؞����ؓ�d�O���m�����O�ܡ�
�\����������������Ҏ���O�ã�
ܛ�����̎���Ҫ�����У�Ҏ����ÿ���S���\�ӿ����������˽�ÿ�������ĕr�g���г̣����������ó��ٶȡ����ٕr�g������ٶȡ��Q��r�g���������_��Ч����ߡ�Ч����á������μӜp�ٞ������v�����Ҏ���OӋһ���\��������Ҋ�D2�����f����
��������λ����������ͨ�õĿ��ƿ���PLC�,Ոע�������c��
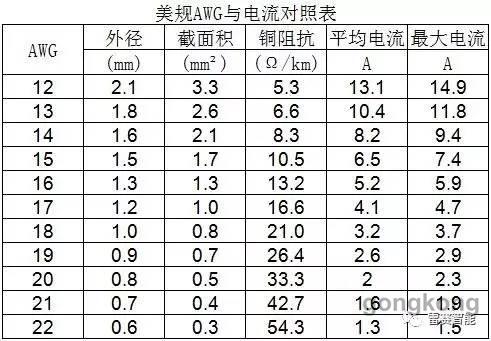
1��������̖�ĸߵ��ƽ�r�g�Ƿ�M�������f�����ϵ�Ҫ����������̖ݔ���l�ʶ������ޡ����Mͨ����200KHZ���ŷ�ͨ����500KHZ�����^��200K,500K����һ��ǰ�ռ�ձ���50%�r�����H��200KҲ�������˸ߺ͵��ƽ�r�g����С��2.5�룻500K�r���ߺ͵��ƽ�r�g����С��1�롣
2��������̖�ķ��ȣ����ƽ�����3.5V�����ƽ�����0.5V��MCU��ݔ����ͨ������ֱ�ӎ�����������Ҫ�O�÷Ŵ��·���Ŵ������������ʹ�}�_����ݔ����̖���_�����͑������10������
3��������̖�ĕr����M���f�����ϵ�Ҫ��ͨ��������Ҫ������̖������ǰ�}�_��Ч��1-2��ĕr�g��
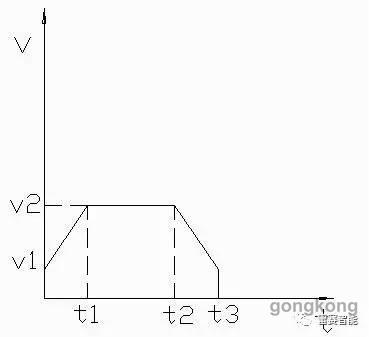
�D2
�f����
V1�������ٶ�
V2������ٶ�
t1�����ٕr�g
t3-t2���p�ٕr�g,ͨ���OӋ�ɺͼ��ٕr�gt1һ�¡�
�C��60���µIJ��M늙C�����h�����ٶ��O����1.5�D/�����£��_�����]����ߑ����D��20�D/��ļӜp�ٕr�g���]30-150���룬늙C���w�ߴ�86MM�����ϣ����h��ʼ�ٶ���1�D/�����£��_�����]����ߑ����D��10�D/��ļӜp�ٕr�g���]80-200���롣
400W�������ŷ����h��ʼ�ٶ�3�D/�����£��_�����]����ߑ����D��50�D/��ļӜp�ٕr�g���]15-200���롣
750W-2000W�ŷ����h��ʼ�ٶ�2�D/�����£��_��30�D/��ļӜp�ٕr�g���]40-300���롣
֪�����г�S�������S�ĕr�gT���Ϳ����@��Ӌ���V1��V2��t1
S=(V1+V2)*t1+V2*��T-2t1�����鷽��Ӌ����V1=0;�tV2*(T-t1)=S;֪��S,Tֵ��V2,t1�Ľ��ȡֵ�������_��V2��t1�е���һ����ʣ�µ�Ҳ�ʹ_���ˡ�
|





