1������X݆�ȅ�����B

���^�� ����X݆�� ���ܣ���Ҫ�Ѓɷ���đ��ã�һ���{��늙C���D1Ȧ����Ҫ��ָ���}�_�����Ա��C늙C�D���܉��_�������D�١�������λ�CPLC���l���}�_�l�ʞ�200KHz������������X݆�ȣ� �t늙C���D1Ȧ��Ҫ10000���}�_����ô늙C����D�ٞ�1200rpm��������X݆���O��2��1�����ߌ�ÿ�D�}�_���O����5000���t�˕r늙C�����_��2400rpm�D�١�
���磺����X݆���O��1�� 1����ÿ�D�}�_���O��10000����λ�CPLC��߰l���}�_�l�ʞ�200KHz��
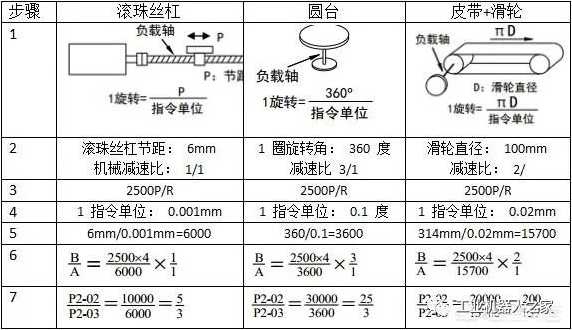
2��ÿ�D�}�_��������X݆�ȵ�Ӌ��
��������1��6�����Ӌ��ÿ�D�}�_����������X݆�ȡ�
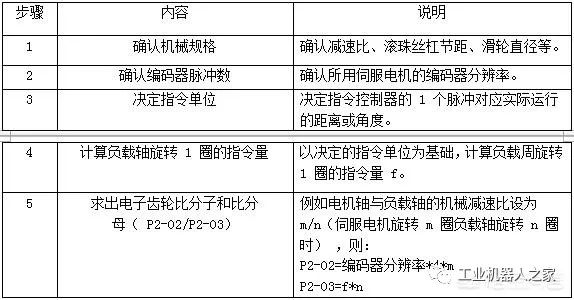
ע�⣺
��1��ÿ�D�}�_��������X݆�ȶ��������ŷ�늙C���D1Ȧ�����ָ�����������ǻ��a�Pϵ������ÿ�D�}�_���ă��ȼ�Ҫ��������X݆�ȣ�ֻ��ÿ�D�}�_���O����0����r������X݆�Ȳŕ���Ч���@���Ñ���Ҫע��ġ�������r�����ÿ�D�}�_����С���r��Ҫ���]ʹ������X݆�ȡ�
��2��P2��02��P2��03���^�O�������r��Ո�����ӷ�ĸ�s�ֳɿ��O�������ȵ��������M���O�����ڲ���׃��ֵ��r�µļs�ֲ�Ӱ�ʹ�á�
��3�����������f���F������늙C���a���ֱ��ʾ���2500P��R��
��4��ָ���λ���������ӹ����ȡ��ڙCе���ȵĻ��A�ϼ���ָ���λ������������ŷ��Ķ�λ���ȡ������ڑ��ýz�ܕr���Cе�ľ��ȿ����_��0��01mm����ô0��01mm��ָ���λ�����ͱ�0��1mm��ָ���λ���������_��
3������X݆���O������
�e����
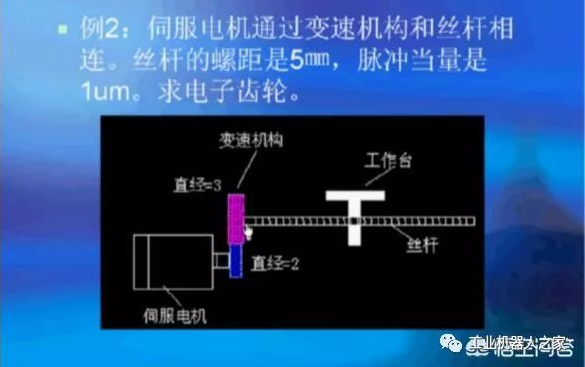
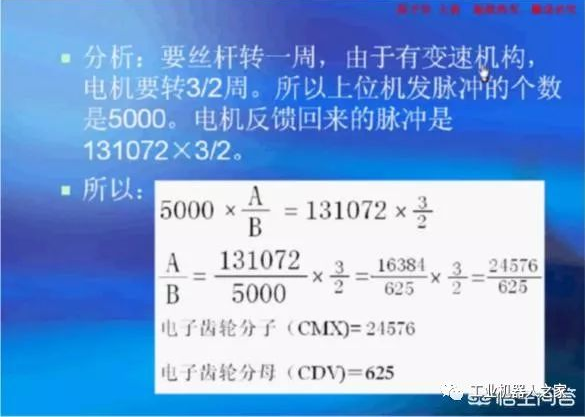
�������ӵ��a���f������λ�C�}�_����5000����ͨ�^���z���ݾ���5mm���}�_����Ҫ����0��001mm�������}�_������5��0��001��5000�����a�������}�_��131072һ�D���ŷ�늙C����������׃�ٙC������3��2��






