|
���N���ö�ʹ�������L�����l���D�Q�����̖��MEMS �����L����ȫ��ָ���ԣ����κη����ܾ����ʰȡ�������z�����D�Q�����̖�����г����������֮�⣬߀���������������������ˣ����Բ��� MEMS �����L��к����P���Ԫ�����ƽ��ܙz�y���������|��ԓ��п����ڄ���һ�N����푑���Ҳ�Q�����������ɞV������Ҫ��������ͬ�r̎����Ը����뷽����������@ƪ�����У��҂�����B MEMS �����L��еĻ��A֪�R�����������Ĺ���ԭ������Ҋ���ú͵��͑��á�
MEMS �����L���[
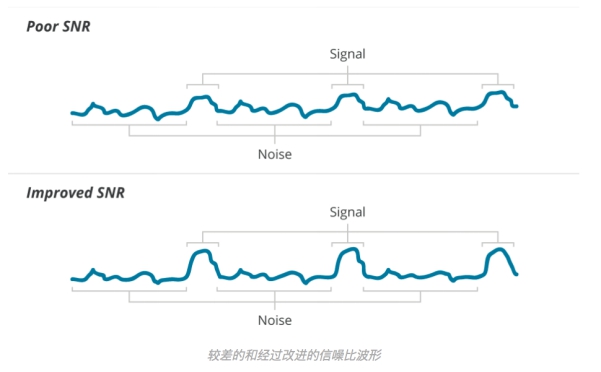
����������̖���c����Ҫ�������������ı��ʷQ������� (SNR)��MEMS �����L��п������������������p�ٲ���Ҫ�������Ķ�����ϵ�y�� SNR��
�ژ��� MEMS �����L��Еr����ʹ�Ãɂ������������L�ռ����l����Ȼ��Y�ϸ��������L�l�������̖���a���ϳɵ����̖���ڽY����̖֮ǰ������������·̎�����������L�l������̖���Ŵ����t���V���ȣ������^늚�̎��֮��������̖�õ�������������Ҫ����̖�t���p������Ҫ��Ч̎����̖�������ʹ�õ������L��횾��оo��ƥ�������Ҏ����߆Ϊ�����Ҏ�����ܡ������L���`�����DZ��C������Ќ��F����ƥ���������Ҫ������ MEMS �����L�����댧�w���칤ˇ�����оo��ƥ����`�����ݲ��ֱ��ʹ�ã��������L��е������x��
���������L���
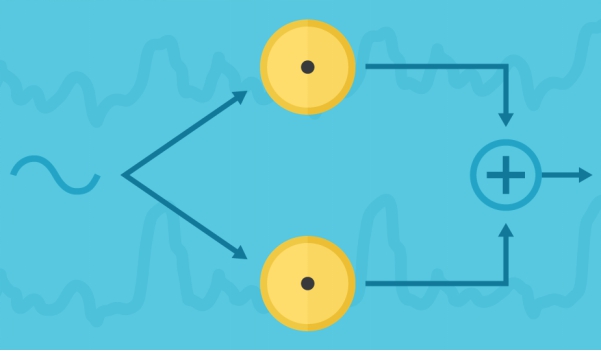
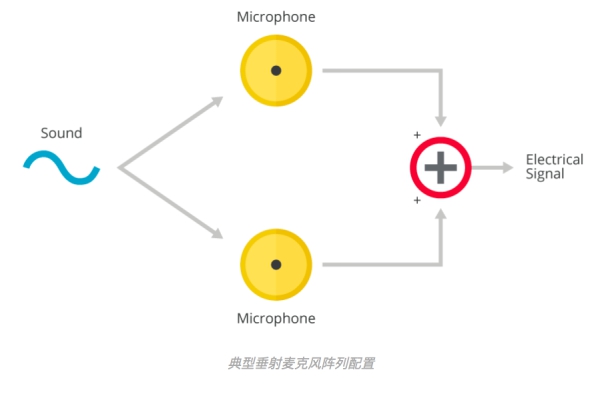
�S�������L���ö����ض��ā�Դ���ԫ@�������������ˣ�ͨ�^���� ��ָ����������������ԡ���������������������ϵ�y�� SNR�����������L����Ǵ�ֱ������Դ���õ�һ�S����S�����L��У��Ɍ����������L�l������̖��ӣ��Ķ��a����������̖����ֱ����еķ���a������ͬ�r���_�����L����˿������̎���зe�O��ӡ�����ֱ�����֮��ķ���a���������_�����L�ĕr�g���в�ͬ�̶ȵ����t��ͨ�������в�ͬ�r�g���t����̖�������������ӣ����a���^��ˮƽ�������̖��
Ӌ��C�@ʾ�����ҕ��Ļ�����l�ӿھ��Ǵ��������L��е����Ñ��á������Ñ�ֱ��λ����Ļǰ���������Ќ����������@ʾ����ͬһƽ���ϡ����⣬߀�����ڬF���@ʾ����������ȃȌ�ʩ��С�
���������L���
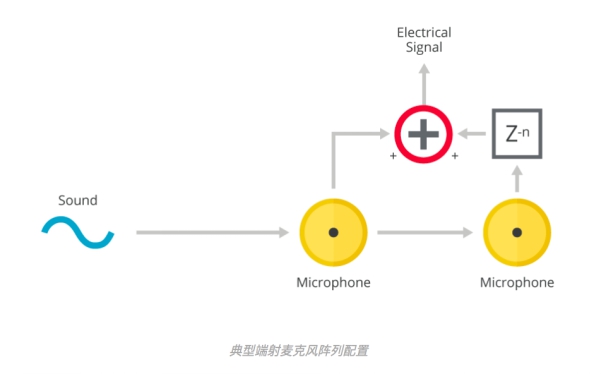
ͨ�^������Դ�ķ�����һ�������L������������L��У��˕r���������Բ�ͬ�ĕr�g���t���_���������L��ÿ�������L��̎���·������ͨ�^��ӕr�g���t�a�������L�����l�r�g���t�����������L��кʹ��������L������ƣ����������跽�����̖�܉�e�O��ͣ������������������̖���ֵ�t�^�͡�
�mȻ����Ͷ��������L��ж��������������S��������@��˥�p������Դ�����Ǵ�������������L��е�ǰ��ͺ������ͬ�ȳɹ��ز��@����������ЃH���@���ǰ������������˥�p��к����Լ����������������������߀��Ҫ���H��������������ֳ�ʽ�����L���@�N�ؓ��һ���ܺõđ��ã������O�����ֱ��ָ�������vԒ���裩���˲��҃H���@ԓ��̖��
���� MEMS �����L��Б���
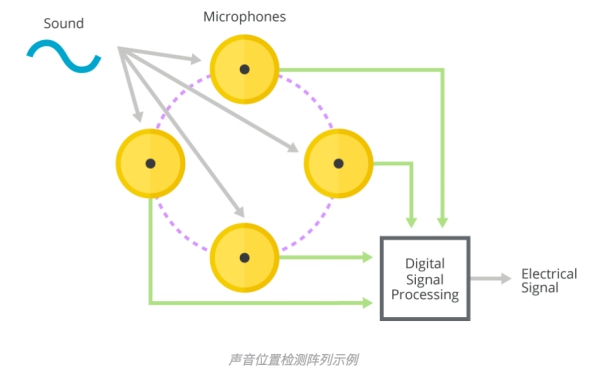
MEMS�����L���߀�����ڴ_������������еķ����ڱ����õ�һ�N��Ҋ���F�У������L���������ڈAȦ���������߅�ϡ����������̖̎���R�e���������L�l����������̖��ͬ�r���Խ����ڸ��������L֮�g���͵�������̖�������r�g���t���_�������������L��е���Դ��
��λ�������L��еij�Ҋ�����Ǿ����܊꠵�����z�y���c�����L������P�Ĕ�����̖̎�� (DSP) �·���ԅ^�֘��c����������������Ȼ��_����������
�YՓ
MEMS �����L��к����P������·�����ڏ������ıO�y�����M��ӑ���ͨ���OӋ�ж���ʮ�������L���Կ����Ñ�����K�ɱ�������������Ҫ�ĵط������ṩ���^300�������L����У��������������l�l�V���ṩ�o�ܵ����S���g�ֱ��ʡ��@Щ�����L������ڰ�ȫ�z�y�ͱO�صȑ��á����ǣ�ֻ�в�����������ƥ��������L���܌��F�����L��С��b���@һԭ���еͳɱ����`���ȹ���� MEMS �����L�ɞ������L��Б����OӋ�ߵ����x�� |





