�ڟoˢֱ��늙CBLDC������oՓ���ڎ�������߀�ǟo������늙C���������õ���ǰ��/��ͨ�ǣ�Lead Angle�������늙C��Ȧ�Ǹ���ؓ�d�����������ھ�Ȧ�ϵļ��d늉�����Ȧ����������һ���ĕr�ӣ��@��Ӱ�늙C��Ч�ʺͮa���������ӵȡ�
����BLDC�����β�/�������ƣ��{ԇ���xȡ���m�ij�ǰ�����ڲ���׃���������㷨����r�£����@����늙C���Ƶ�Ч�ʺ���������ˮƽ���e���ڎ�������늙C�����ƕr����ij�ǰ���ஔ���{��늙C�Ȳ��Ă�����λ�ã��Ķ�ͨ�^�ú������е�ܛ���������F��ͬ���Բ���������y�ķ�ʽ�{������������λ�õ�Ч����
1������BLDC����ԭ�������β���
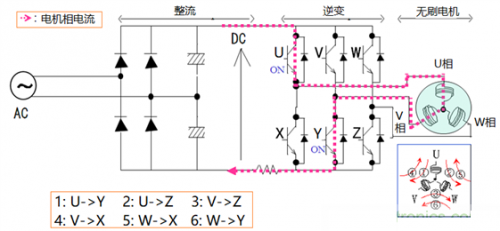
�D��ʾ���oˢ늙C���β������㷨�Ļ���ԭ�������ȣ������������ֱ��늉�����׃�l���֣�inverter��������6���_�P������FET�����Ϙ�۵�U��V��W����۵�X��Y��Z��
����һ���������@ЩFET�_�P���������磺
1��U->Y
2��U->Z
3��V->Z
4��V->X
5��W->X
6��W->Y���ٶ�늙C��������D��
��ô��������������������^늙C��Ȧ��
1��U�ൽV�ࣨU->V��
2��U�ൽW�ࣨU->W��
3��V�ൽW�ࣨV->W��
4��V�ൽU�ࣨV->U��
5��W�ൽU�ࣨW->U��
6��W�ൽV�ࣨW->V��
��6�������ѭ�h������D1��ʾ��
�D1
ͬ������늙C����鷴�D���t�_�P���飺
1��U->Z
2��U->Y
3��W->Y
4��W->X
5��V->X
6��V->Z
�@���ǟoˢ늙CBLDC�����β�/���������㷨��
2������BLDC���ƕr��
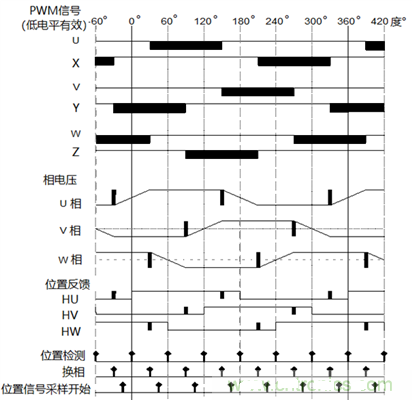
�oˢ늙C�Ŀ��ƕr����ه��늙C�D��λ�ã��鷽���f����ǰ��/��ͨ�ǣ��@���Ԏ�������������늙C���������ջ���оƬ��λ���Д࣬���������Дࡣÿ�z�y��һ����Ч�Ļ���λ����̖���a��Pattern�������_ʼ�Q�ൽ��һ����Ȼ������_ʼ�z�y��һ�ε�λ�÷����Дࡣ���D2����������6�������Q������
1��U->V
2��U->W
3��V->W
4��V->U
5��W->U
6��W->V
��ѭ�h���͡�
�D2
��ÿ�Ιz�y������λ��Pattern�r���Q�ಢݔ���������}���{�ƣ�PWM - Pulse Width Modulation��Pattern��֮��λ�÷�����̖�_ʼ�ɘӱO�أ�ֱ���ٴΙz�y����Ч�Ļ���λ��Pattern��
�D��PWM�_�P��̖��U~Z���еĺ�ɫ�^�K����Ч�ƽ���Ⱥ�PWM�d�����Ď�K����ʮKHz��Duty��׃�����D�е���늉���U��~W�ࣩ�еĺ�ɫխ��������ڴ˓Q���r�̣��Ĵ�һ���ГQ����һ��PWM Pattern���������m����ԭ��늙C��Ȧ��늸У���ɵēQ��늉���׃��
3����ǰ��
�ڟoˢֱ��늙C��BLDC - BrushLess DC�������{�����õ�Lead Angle������ǰ��/��ͨ�ǡ����늙C��Ȧ�Ǹ���ؓ�d�����������ھ�Ȧ�ϵļ��d늉�����Ȧ����������һ���ĕr�ӣ��Ķ�Ӱ�늙C��Ч�ʺͮa����������늙CU��늉��e�������ψDPWM��̖U��X��U��늉����ηŴ����D������U��չ�_�ɿ������H늉����Σ��Ⱥ�PWM�d��������PWM�d�������j�D�����D3�����沨����ʾ��
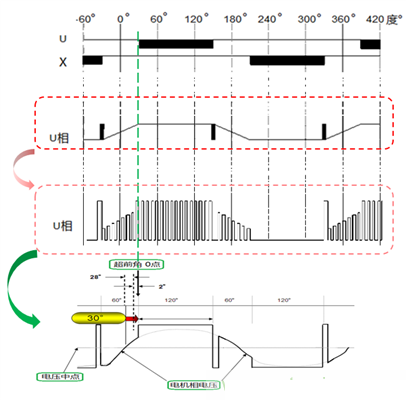
�D3��U��չ�_�r���H��늉�����
�@��Gɫ̓��̎�ǓQ���c�����x�鳬ǰ��/��ͨ��0���c��ԓ�cλ����늉����c��߅����߅��30�ȡ���Lead Angle��ǰ��/��ͨ�ǣ����˼�x���Ǐij�ǰ��0��������ǰ����ǰ���ٶȡ�
һ����f���e�ǟoˢ늙CBLDC���β������㷨����늙C���D����r�£���Ҫ��ÿ���Q���cǰ��6��PWMݔ����̖��U~Z������һ����Lead Angle��ǰ��/��ͨ�ǣ��D4�Dz�ͬ��ǰ��/��ͨ�ǣ���0�ȡ�7.5�ȡ�15�ȵ�30�ȣ����քe������ݔ����̖��
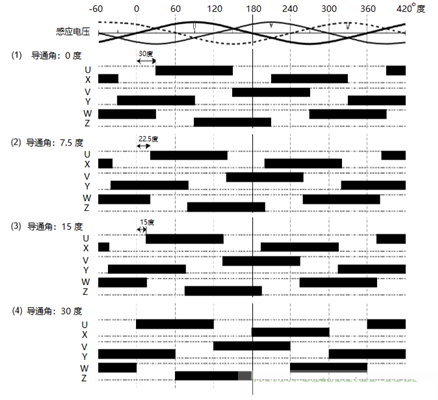
�D4
��ǰ��/��ͨ�ǵ��{ԇȡ�Q��늙C���텢����늙C늉��Լ�늙C�D�ٵȡ�һ��Ľ����f��������ͬ늙C���ڽo����늉��£�늙C���D��Խ�ߣ���ô����Ҫ���ߵij�ǰ��/��ͨ�ǡ��{ԇ���m��Lead Angle���P�I����������늙C��ؓ�d��r�£��ڸ��dȤ�Ĺ����D�٣��������ҳ�늙CЧ����ߣ�ݔ������/ݔ�빦�ʣ���늙C������������С����r��
���ڎ�������������늙C���f���{������������������λ�ã���������ӽǶȣ�Ҳ�������Ч������һ����f������������λ��늙C�ȵ�PCB���ϣ���̫�����{�������^���f��ͨ�^�{��Lead Angle��ǰ��/��ͨ�ǣ�ֻҪ�����������ǶȺ���ӽǶȣ�ȡ�Q��늙C�D�ӵĘO�������Pϵ��Ҳ�����������늙C�Ȳ���������������λ�õ����ã��Ķ�ͨ�^�������е�ܛ����ʽ����ǰ��/��ͨ�ǵ��{�������F��ͬ���Բ��������s�ķ�ʽ�{������������λ�õ�Ч���� |





