�oˢֱ�� (BLDC) 늙C�ڸ��N���ӵđ����ЏV����A����Ӌ��C��s�L�ȡ��űP�������o��늄ӹ��ߡ�늄�����܇�Լ�늳��C�D�P�� �S���r����m�½���늙C���õ��������V���đ��ã����ɱ�������еđ��Ät�����eՓ�� Ȼ�����S����������ӣ��˂�ҲԽ��Խ���Ҫ�� BLDC 늙C�\�и�ƽ��������Ч�������o��
�����mȻ���ҿ������_���@ЩĿ�˵���ѷ�ʽ���������ڸ�����y�����ο��Ƽ��g���@�N���Ƅt�����ӳɱ��͏��s�ԡ� ���Č�ӑՓ BLDC 늙C���ƵĻ���ԭ�����Լ�ʹ�����ҿ��ƶ��������ο��Ƶ�ԭ�� ����߀����BһЩ�F�ɵ��̘I��Q��������������ʽ늙C�����Ϳ�����оƬ����ʽ���@Щ���������ڸ����p�ɵ��^�ɵ����ҿ��Ʋ��ӿ��OӋ���̡�
����BLDC 늙C����ԭ��
����BLDC 늙Cͨ�^����늙C�O��������ʹ�ÙCе�Q������Ҫ���@�M�ɞ鶨�ӣ������w�ɞ��D�ӵ�һ���֡� �@�Mͨ����ʹ���}�_�����{�� (PWM) ���Ƶ��� MOSFET 늘�늣��������տ��ƴ����M���D�a�����D�ň����Ķ�����ק�����@�����D�Ӳ������B��ؓ�d���D 1����
�����Q�����D�ӺͶ��ӵ�����λ�ô_�������w�tͨ�^����Ч���������y������ͨ�^늙C�D�ӕr���ɵķ�늄ӄ� (EMF) ���Ȝy�����ޟo������늙C����
����Ŀǰ�����N��ӓQ����Ʒ��������Ρ����Һʹň�������� (FOC)�� FOC ���F�ɱ��ߣ������ڸ߶ˑ��ã���˱��IJ���ӑՓ��
���������S�����ã����ο��Ƶ� BLDC 늙C����ѽ�Q������ �@�늙C�Y���o�������ܿɿ����҃r��Ҳ��Ѹ���½�����������m���S��С��늙C���ã�������܇����ɫ��늺�Ӌ��C��
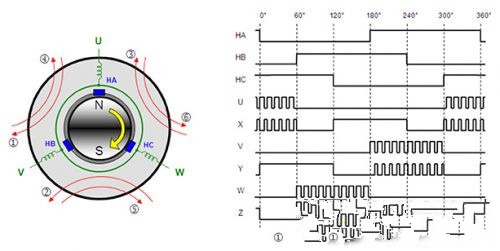
�������⣬���μ��g�������F�����Ҳ���ܚgӭ�� 늙Cÿ����ֱ����늣�ÿ 60? �M�ГQ�� ��λ�Ӟ顰�ߡ������͡��ָ��Ӡ�B��
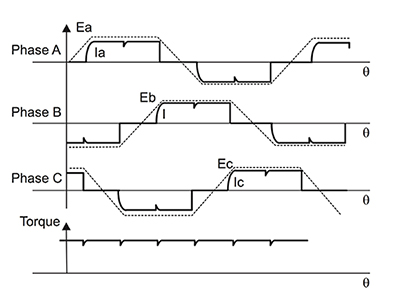
������Փ�ϣ��@�ӵ�ϵ�y�ɮa��ƽ�����㶨Ť�ء� ���H�ϣ��ض���λ�����������˲�g�ɵ��D��ߡ� �෴�������µ������r�g��ݔ���������c�D�rһ�µIJ��y���D 2����
�����D�ز��Ӳ������ο��� BLDC 늙C��Ψһȱ�c�� ��һ��ȱ�c��늚���W���� һ����Ҫ�������Ǟ�ÿ����λ��늵Ŀ����ГQֱ������� ��늚�Ƕȁ��f���@�N�����ӟ��@�M������Ч�ܡ� ���W�Ƕȁ��f���_�P�l�ʼ����C���a���ġ����ˡ����l���mȻ���Ǻܴ�ʮ�̶ִ���
���������P BLDC 늙C�\�к����ο��Ʒ�����Ԕ����Ϣ��Ո����Y�ώ����¡���Ό��oˢֱ��늙C�M�й�늺Ϳ��ơ�����
������ʩ���ҿ���
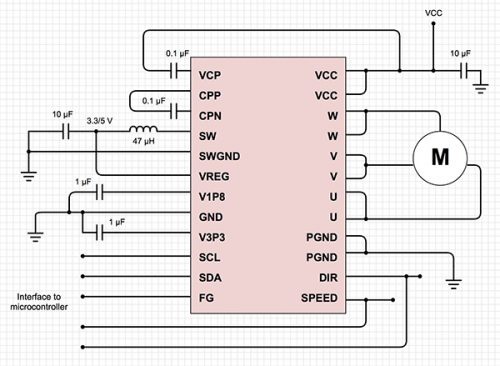
�������ҿ���ʮ�֏��s�������й��̎����ԃH���û���ԭ���͌��Fϵ�y�� һ�����õķ�����������оƬ�����̵�֪�R�� BLDC 늙C�OӋ�_�l���� NXP �� FRDM-KE04Z ����һ�����ӡ�
���������� Kinetis KE04 ARM? Cortex?-M0 MCU �\�������㷨�� ���ڿ����·�OӋ����һ�N��ͨ�� BLDC ����оƬ������Mһ���p�p�ˌ��F�y�ȡ� �@Щ�O��ͨ���� PWM ���ƺ��������������ɵ�һ��оƬ�����ṩ�ⲿ MCU �Ľӿڡ� �����O�伯�� MCU���H��һЩ�~��ğoԴԪ�����Ϳ����γ������·��
�������������ʽ�������Ρ��D
�������`�ИO��ʹ�ü�������늉�����������ڽӵض��ԣ���ÿ��늙C��������늉���Ч�ʺܵ͡� һ�����õķ�����������λ�g�������Ҳ��늉�����λƫ�� 120? �M�ГQ�� ���F��ʽ��ͨ�^ʹ�á����Ρ��D�����������ң���׃�����ڽӵص� PWM ռ�ձȣ��Լ���늉������D 3���� �S����늙C�����������ѭ���g늉��ļ����Ҳ�׃����
�������ΈD�����Ѓɂ����c�� ��һ�����a���������늉�Ҫ���ڼ�������̖���ܮa����늉�������o��ݔ���Ť�غ��ٶ�Ҳ���� �ڶ���ÿ������ 1/3 �r�gݔ�����㣬�Mһ���p���˹��ʼ��е��_�P�p�ġ�
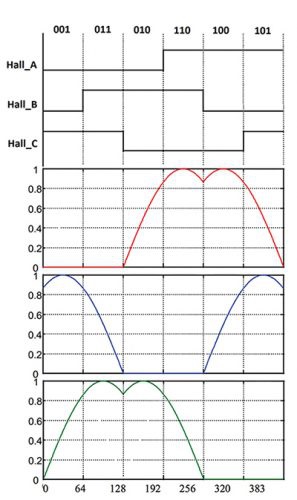
�������ҿ��Ʒ�����һ�����s֮̎���ڣ������γɰ���늉�ݔ���������늙C�Ƕȁ����_����ռ�ձȡ� �@�ڸ������D�r����׃�ø������y�� ������Ҫ����ÿ�Dֻ�ܾ��_�_��늙Cλ�����Σ����D�ӵ�����һ���ŘO���^���������������е�һ���� ���磬FRDM-KE04Z ���õĽ�Q�����nj�늙C���ٶȳ��� ?T ���ٶ�늙C�ٶȺ㶨���Ķ��������������֮�g��늙C�Ƕ� (��mtrAngle��)��
����Ȼ��ʹ�ò�ԃ���_���ض��Ƕȵ� PWM ռ�ձȡ� �� FRDM-KE04Z �У���ԃ���늙C���D��ÿ���Ƕȣ����H 384 ���������ṩռ�ձȡ�
���������������ʹ�ð��ΈD�ĸ���Ӱ푡� �e�f���������ض���λ��늉�ֵ������֮һ�r�g�Ȟ��㣬�@�Εr�g����Ҫ��ԃ�������Ҫ��̎�����YԴ���٣������S�ڑ�����ʹ�ø���ͨ�ĵͳɱ� MCU��
�����@�N������ȱ�c�dž����A��늙C���ټ��ٕr������������֮�g��늙C�ٶȲ�ֵ�ܿ��ܲ����_�� �@������Ť��푑���ƽ����
����ᘌ��@һ���}��ROHM Semiconductor �� BD62011FS �L��늙C���������õ�һ�N��Ҋ��Q�����ǣ������ο���ģʽ����늙C�����_���ض��ٶȣ�ͨ�� 5 - 100 Hz�����ГQ�����ҿ��ƣ��˕r��ֵ�ľ��_�ȸ��ߡ�
����Rohm ���O����Ҫᘌ��������������� BLDC 늙C�Ŀ��ơ� оƬ���ø߉��Ⱥ͵͉��� MOSFET �� PWM ���ƺ����ғQ��߉�� ������ 10 �� 18 V ݔ�뷶�����\�У����ṩ���� 2.1 �� 5.4 V����� 1 W����ݔ�������� Ŀ�ˑ��ð������{��ˮ�úͰ�ɫ��늡�
������һ���OӋ�����ǽo����λ��늉��ͮa�������Ҳ����֮�g����λ���t��ͨ���l���ڷ��a���� BLDC 늙C�� 늙C�������\�У���Ч�܌����ͣ��@�����ȴ씡���F���ҿ��Ʒ�����Ŀ�ˡ� �@�NЧ�ܵ��µ�ԭ������늉�����λ���֮�g����λ���t��������λ��������ҷ�늄ӄ�֮�g����λ���t��
�������\���ǣ��S����оƬ������ ON Semiconductor �� LV8811G ���� MOSFET ���������S�OӋ�ˆT����������������볬ǰ��ǣ��Ķ��_�����ֵ�c��늄ӄݵķ�ֵһ�¡� ��ǰ���ͨ���O���Sݔ��늉��������ӣ���늉��Q��늙C�ٶȣ��D 4����
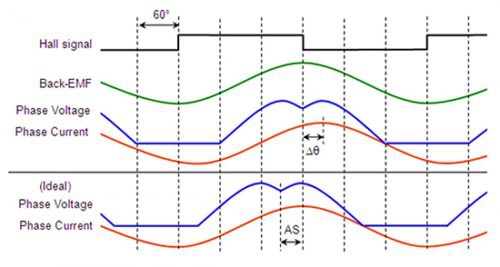
����LV8811G ������ BLDC 늙C�������Ɇ��������������Ʋ��������ҿ��ơ� ֱ�� PWM �}�_ݔ���ֱ��늉�ݔ�붼�����ڿ���늙C�D�١�
����ʹ�� LV118811G �r���OӋ�ˆT��ͨ�^���_ PH1 �� PH2 �ϵķ։���������O�ó�ʼ�l��������_ʼ��ǰ���ٶȺͳ�ǰ���б�µ��ݶȡ� ֮��оƬ�ăȲ�߉�����A����ʽ�_���o���ٶȵij�ǰ��ǡ�
�����o������ BLDC ���ҿ���
�������ҿ���߀��ͨ�^�o�������� BLDC 늙C���F�� �@Щ늙C���\�з�ʽ�cʹ�û���Ч����������늙C���ƣ�����λ����Ϣ��ͨ�^�y����늄ӄݫ@�á� �����PԔ����Ϣ��Ո����Y�ώ����¡�ͨ�^��늄ӄݿ��Ɵo�������� BLDC 늙C������
�������磬Texas Instruments �� DRV10983 �����OӋ���ڟo�������� BLDC 늙C�����ҿ��ơ� оƬ���������������������B���ⲿ MCU ���ṩ���_ 2 A ���B�m����������ҿ���ͨ�^ʹ�ù�˾�Č��п��Ʒ����팍�F��
������ԓ�����У��Q������㷨�B�m�y��늙C����������ڜy�����늉��� Ȼ���O��ʹ��ԓ��ϢӋ�㷴늄ӄݺ�늙Cλ�á� 늙C�ٶ��Ɇ�λ�r�g��һ����λ�ķ�늄ӄݵ��^��Δ��_���� оƬ߀���S��ǰ��ǣ����{��������ͷ�늄ӄݣ��Ķ����F���Ч�ܡ�
����DRV10983 �nj��T�OӋ���ڳɱ����С����������ⲿԪ����Ӌ���đ��ã��D 5����
�������Y
����BLDC 늙C�������ܺͿɿ��Եă��ݣ�����u�ɞ���y��ˢ��늙C������aƷ�� �����S�����ã����ο��ƿɝM��ʹ���A�ڣ�������OӋ�ˆT���΄������Ч�ܡ��p��늚���W�������Ť���f���t�����]���ҿ��ơ�
�����mȻ���ҿ��������ˏ��s�Ⱥͳɱ������_�l���ߡ������� MCU �Լ��������� IC �Ѵ�����OӋ���̣�ʹ���ҿ��Ƹ��ӌ��ú��Ρ� ���H��ˣ��_�l���ߵ��`���Ժ����� IC ���m����ʹ�OӋ�ˆT�܉��{���õ�늙C���������Pע�aƷ������档
|










