�������M늙C���B�����ᣩ���ԵĜy��
�������M늙C���D����1����Dz��M���t���D�ӕ��a����ʎ��������˥�p��ֹͣ��ȡ�v�S��ʾ�Ƕȣ��M�S����r�g���D������˥�p��ֹͣ���Q�镺�B�����ᣩ���ԡ�
�����˷N�y�����������D��ԇ�Y����
��
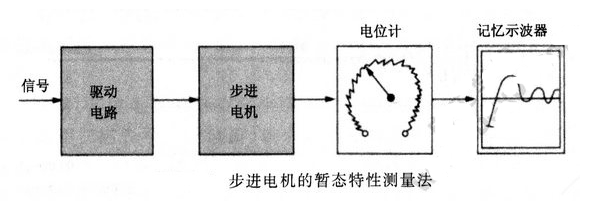
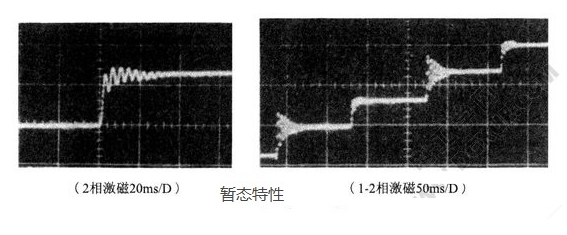
�������·�_�����ŷ�ʽ�����M늙C1���M�ӡ��˕r�����M늙C���b���λӋ����ݔ��������ӛ��ʾ�����������˷����ܜy�����B���ԡ��ô˷������Ԝy��������ͨ늠�B���Ƕ���ʎ׃�����D�Ӷ�λ�ij��{�����D�Ӷ�λλ�ü�λ�õķ����r�g�ȣ�������Y�����Σ����Ա�����ʹ�á��ô˷����y������HB��1.8�㲽�M늙C��2�༤���c1-2�༤�ŵĕ��B���ԡ����D��ʾ���c1-2�༤����ȣ�2�༤�ŷ����Ժã�1�༤�ŵ����γ��{���������c2�༤����r���^���кܴ�IJ�ͬ��
�������M늙C���B�����ᣩ���ԵĜy��
����1-2���Ӡ�B�£���������Ѡ�B�_������λ�ã����ŷ�ʽ��2�����ˡ�
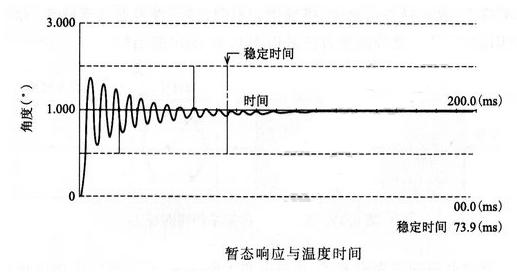
�����y�����B���ԣ��v�S�ĽǶȾ���Ҫ�����_�ī@ȡ���λӋ�þ��a�������棬�䷀�����ο����ô�ӡ�Cݔ�����D��˜y�������ķ������Σ��Ѓɴ�˥�p��ʎ�����_ֹͣ�Ƕȵġ�5%�ȣ�����1.8���5%�xȡ�����r�g��setting TIme����
�������M늙C���B�����ᣩ���ԵĜy��
�������λӋ�����^�����a�����a���T������Pϵ����Ҫע�ⷀ���r�g�Ľ^��ֵ��ͬ��
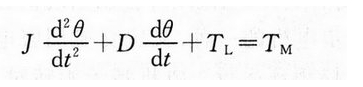
����һ������������ǰ�ġ����M늙C�ļ��١��p�ٿ��ơ��е�������ʽ��ʾ��J��D�c늙C�a���D��K�ȕr����D/��JK����JK�����ڸ�̖�ȣ�����õ����ƣ�˥�p��ӵĽ��ٶȽ��ƣ���K/��J����
��
�������M늙C���ƕ��B���ԵĽ�Q����
�������M늙C��λ�ö�λ�r�����늙Cؓ�d���D�Ӄ���Ą��ܣ���������ֹͣ�����a�����{�������ͽ��^�O���c��ͣ�����˷N������ʎ���L�˶�λ�r�g���б�Ҫ����늙C������Ͷ�λ�r�g�����Ƶķ����а��b���������������·��늙C�����ĸ��Ƶȣ����挢�քe�����f����
���������������ĸ���
���`��ӑB�������IJ��M늙C����Ƭ���˷N���������ڲ��M늙C�S���w݆�ϰ��b���z�������b�ã�ʹ�w݆���\�Ӝ������D�S���\�ӣ������c�D���g�������λ��D���M���Ƅӣ����ƕ��B���ԡ�
�����D�鎧�ӑB�T���������IJ��M늙C���B���ԵIJ��M푑��ı��^���˷N�������������������Ƅӷ����ǘӣ��ڮa�����{����Ƅӣ���Ҳ������������ij��{����
�����˷N�ӑB�T�����������Ը��Ʋ��M늙C���م^��Ĺ���������D�ؽ��ͣ�Ҳ���Ը��Ƹ��ٕr���D�غ�푑��}�_��
�������M늙C���B�����ᣩ���ԵĜy��
�����������·�ĸ���
�����벽�M1-2�༤�ŵ���r�������Լ���λ�r������2�༤�ű�1�༤��Ҫ�á����ԃ��ಽ�M늙Cʹ�ð벽�M�ӵ�1-2�༤�ŕr��ֹͣ�����2�༤�ţ������׃�á�
�����������Ƅӣ����P�������Ƅӣ���ǰ�ġ����M늙C�����Ƅ��ӷ������������c��K���M���t���ѽ�B���˷N��������ѿ��ƣ���������ij��{��������ӡ���˽�B�������Ƅ����]�h��·��
�����D��ʾ���M늙C������S�����Ĝy�ٙC�Y����
�����ɜy�ٙC�õ��D���ٶȣ�����ѕr�����������Ƅӣ��䷴���ŵ��·
�������·ݔ���εĽY���������Dǰ�ġ����M늙C���ӄӑB�D�صĽ�Q�������е��D��ʾ���·ݔ���νY���������ʹ�OFF�r����������·�Č�ͨ���a�����Ƅ��D��׃����D�еĢٞ��Ƅ��D����С�ĽY�����ڸ��ٕr���D�ؕ����ͣ���Ҫ���]�D���c�Ƅ��D���ߠ�B��ѕr�����·��
����늙C���w�ĸ���
����PM�Ͳ��M늙C�ĘO���Ժ���ͬ�Դ��F���ٶ�-�D�����Ա��^��ǰ��ġ����F�Ż�������ͬ���c�����Դ��F�IJ�������D�ѽ���B�ˣ��˕r�ăɂ�늙C�ĘO�������ô��F�Ĵ�ͨ����ͬ�Դ�ͨ����С��
�������@Щ늙C���~��늉��µ��ٶ�-�D�����Եı��^��ע�����ô��F�Ĵ�ͨ��С��늉���������Ĵ�С�c���B���ԡ��D��O���Դ��F�c����ͬ�Դ��F�IJ��M늙C��12V�~��늉��µ��������Եı��^��
�������ˣ���λ�r�g���棬ʹ�ØO���Դ��F�ķ����r�g�L������������늉������͞�8V�����t���D��ʾ���O���Դ��F�ķ����r�g׃�̡�
�������F����늙C�{������늉���������r�������r�g��׃С���ψD��N����ĕ��B���ԡ�������D���D�ٴ�r���pС���˞��ܵ���늄ݵ�Ӱ����¡�����ͬ�Դ��F�c�O���Դ��F�����ڱ��^������׃�̣���ʎ�Δ���ͬ�s��4�����ߵķ����r�g׃�̡� |





