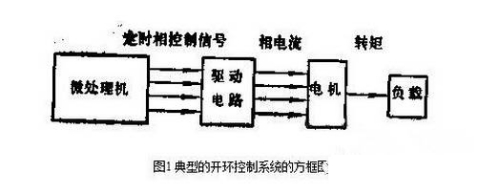
ϵ�y(t��ng)�OӋ�r���ȿ��]��(w��n)�B(t��i)���ܡ������S�����λ���`���Ҫ�����߲��M�l���x���M늙C�����·��������@�N�x��֮���푪���]���ӌ�늙C�����·�M�п��ƣ����Ӱ������B�ӵ�ϵ�y(t��ng)���������֡��_�h(hu��n)���ƾ��к�������ɱ��͵ȃ�(y��u)�c�������ں��Ľ����͔�(sh��)�ؙC������ȼ��g�С��D1�ǵ��͵��_�h(hu��n)����ϵ�y(t��ng)�ķ���D���������̖������̎��C�a����Ҳ������ij�N��ʽ�ĕr���·�a���������@�N��̖���Ӯa�����OӋ�߶���Ҫ֪�����ڶ��r����Щʲô���ơ������ض�ؓ�d�D�ص���߲��M�l�ʣ�����늙C����ؓ�d�T���ĕr�g�ȡ�
�_�h(hu��n)���Ʒ����У�ؓ�dλ�Ì������·�]�з�������ˣ����M늙C������_��푑�ÿ�μ���׃�����������׃��̫�죬늙C���܉��Ƅӵ��µ�Ҫ���λ�ã���ô�����H��ؓ�dλ���������������ڴ���λ�Ì����F(xi��n)�����`����ؓ�d����(sh��)�����ϲ��S�r�g׃�����t�������̖�Ķ��r���^���Ρ����ǣ���ؓ�d����׃���đ��È����У����r�������ģ������ؓ�d����r�M���O������Ȼ���@�Ӵ_���Ŀ��Ʒ�������������ؓ�d������ѡ�
1����ͣ�l��
��ε��_�h(hu��n)���Ʒ�ʽ�Dz��M�l�ʺ㶨���ǷN���Ʒ�ʽ���D2����늙C���_��Ŀ��λ��֮ǰ�����@���l���D�ӡ��������̖�ɕr��l(f��)�����a�����r��l(f��)�����Ɂ��Ժ��l�r犵IJ��M�����}�_�|�l(f��)�������ӡ���̖��ͨ�@���r犣�ʹ늙C�Ե�����l�IJ��M�l���\�У���ֹͣ����̖�P���@���r犣�ʹ늙Cͣ�D���D�ӷ���һ�_ʼ���͵����r��l(f��)��������ˣ����a�����������̖���Ժ��m�ķ����\�D늙C��Ŀ��λ������p��Ӌ��(sh��)���������@��Ӌ��(sh��)��ӛ䛈�(zh��)�еIJ��¡��r��}�_ͬ�r�ͽo���r��l(f��)�����͜p��Ӌ��(sh��)�������ǣ��༤���Ժ㶨����l׃�����p��Ӌ��(sh��)��ӛ�늙C����Ŀ�˵�˲�rλ�á�
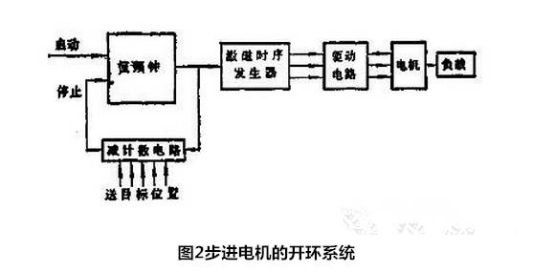
ؓ�d�_��Ŀ��λ�Õr���p��Ӌ��(sh��)���ă��ݳɞ��㡣�r犵ġ�ֹͣ����̖�����@����a��������㶨犽y(t��ng)�l��̫�ߣ�늙C���ܰ�ؓ�d�T�����ٵ������IJ��M�l�ʣ�ϵ�y(t��ng)������ȫ���ܹ������������г̵��_ʼ�A��ʧ�������oֹ�_ʼ��늙C��푑�����ʧ������߲��M�l�ʽ����������l�ʡ����c����ƣ���ֹͣ�l�ʡ���ϵ�y(t��ng)������̖ͻȻ�P�࣬��늙C���_�^Ŀ��λ�õ���߲��M�l�ʡ����κ�늙C-ؓ�d�M�ρ��v�������l�ʺ�ֹͣ�l��֮�g�IJ�e����С��ճ��Ħ��ʹ���ٶȺͲ��M�l�ʽ��ͣ��������ڜp�٣���ˣ������ֹͣ�l�ʡ����^���ں��εĺ��lϵ�y(t��ng)��r犱���{���ڃ���֮���^�͵��ǂ��l���ϣ��Դ˴_���ɿ��Ć��Ӻ�ֹͣ��
늙C���oֹ�_ʼ���ٕr�����M�l�ʺܵͣ�ÿ�༤�����ڱ����·��늚�r�g����(sh��)�L�öࡣ���@�N��r�£�ϵ�y(t��ng)�����܉���늙C���o�D�̣��D��λ�����ԁ�������
�����Y����֪��
��1�����늙C���D�أ�TM�������ؓ�d�D�أ�TL���pС���t����߆����~�ʣ���2���p��ϵ�y(t��ng)�T����늙C�T��+ؓ�d�T����Ҳ����߆����l�ʡ�
��ϵ�y(t��ng)���������ȣ������㲿��ĥ�p����Ӱ�ؓ�d�D�ء��������Sؓ�d�D���Ԟ�׃�������l犑�����õĆ����l���Եͣ��ҿ��{�����˴_��ϵ�y(t��ng)�ڹ����ٶ���r���Cе�C�����У�߀�����]ʧ���D�أ��l�����ԡ������Æ����l��ǡ�ɵ����C���l�ʣ���ô���������^���l�ʵĕr犣�����ͨ�^�������ή���C��Ӱ푡����H�����У������l��Ҳ����ͨ�^ԇ���á�
2�����ٺ͜p�ٹ���
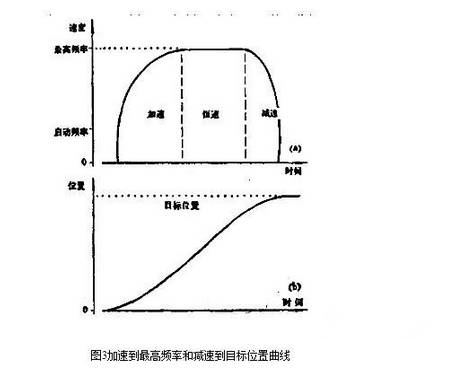
��鲽�M늙Cϵ�y(t��ng)�Ć����l�ʱ���������\���l�ʵ͵ö࣬��ˣ����˜p�ٶ�λ�r�g������ͨ�^����ʹ늙C�ڽӽ���ߵ��ٶ����\�С��S��Ŀ��λ�õıƽ�����ʹ늙Cƽ��(w��n)��ͣ��������ʹ���M�l����u���͵���ͣ늙C�l�ʡ��ij�ʼλ����Ŀ��λ���\�ӵ������^���У����M�l�ʶ���׃������������ʾ���á��ٶ�����������D3��ʾ��ע�⣻�p�ٿ��Աȼ��ٿ�ö࣬���ؓ�d�D�؎���ϵ�y(t��ng)�Ƅӣ����ң�늙C�a���Ĝp���D�ر� ��a���ٶ���������b��������λ�ã��r�g푑����������D�ش�
3���_�h(hu��n)���ƵČ��F(xi��n)
���κ�ϵ�y(t��ng)���x����Ʒ�ʽ��Ҫ���]���ܸߺͳɱ��͵�Ҫ�����磬����ʹ���ٷ�ʽ��ѣ�Ҳ�SҪ��ָ��(sh��)�������������ǣ����F(xi��n)���M�øߡ��OӋ��Ҳ�S���ñ��^���εľ���б�����ԣ�����@�Nб�����Ժܵͳɱ����F(xi��n)����һ���棬�����·��ˇ��Ѹ�ٰl(f��)չ��ʹ�҂����Ե̓r�Ƴɵ�оƬ�õ����N���ӵ��·���ܣ���ˣ���Ӌ��̎��C���Ƶĝ��ڃ�(y��u)�c�ɞ�ܬF(xi��n)���Ć��}�����C���Ƶ�ϵ�y(t��ng)�У���������̎��C�ĸ�ԣ̎�������Á����Ʋ��M늙C���@�r���~��Ĵ��A���ɱ���ܛ���_�l(f��)�ɱ������Ӻܿ��ܵ��ڪ�����Ӳ���������ăr��
��1����̎��C�a�����r ̎��C�����a�����Ʋ��M늙C��Ҫ��Ĕ�(sh��)����̖���_�h(hu��n)�����У���ʹؓ�d���p�����M늙CҲ�����Դ���10000��������ٶȹ�������ˣ�ֻҪ��̎��Cÿ0.1����l(f��)һ�β��M�����ÿ�ΰl(f��)�Ͳ��M��������Ҫ�ij����(zh��)�Еr�g��0.1����С�ܶ࣬���ԣ�̎��C��ȫ�ж���������(zh��)�Єe���΄ա�ʹ���Д��ӳ������늙C��ʹ̎�������õ�������á�
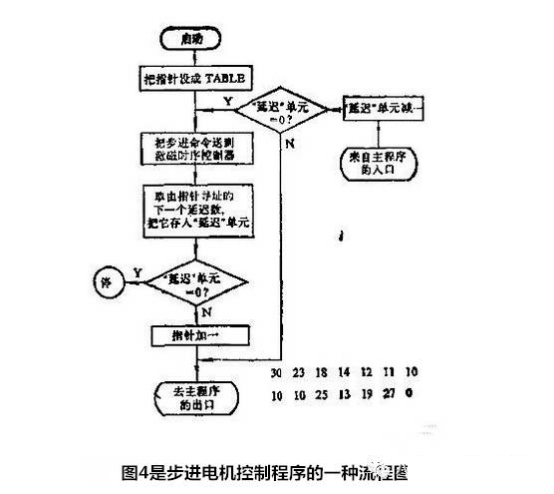
���@�������У�늙C�IJ���(sh��)�ǹ̶��ģ����M����֮�g�ĕr�g�ġ�TABLE����Ԫ�_ʼ�IJ�醱���惦��(sh��)ֵ�Ŀ��ơ��������O�Ĵ�����ָᘡ����ڡ�TABLE���_ʼ����ˣ���ָᘡ����b�в�醱��е�һ��ֵ�ĵ�ַ��Ȼ�ѵ�һ�β��M����l(f��)�o���ŕr���������������׃늙C����༤�š�
�ڰl(f��)��һ�β��M����֮ǰ����M���ӕr��ʹ늙C�Еr�g��(zh��)�е�һ�����@�r�� ȡ����ָᘌ�ַ���ӕr��(sh��)����һ�Ξ��醱���ĵ�һ��ֵ�����������롰���t����Ԫ�Ȼ�z���@����Ԫ�ă����Dz����㡣������㣬��ʾ�ѽ��ߵ����@������ĩβ��������t��ָᘡ���һ��ָ���ȵ���һ����(sh��)������Ƴ���������
�������^�m(x��)��(zh��)��ֱ���l(f��)���´Εr��Д࣬��ʹ̎��C���ص�늙C�����ӳ���ġ���ڡ��������t����Ԫ��Ĕ�(sh��)�pһ�����c����^����������㣬�t��������������������������t����Ԫ���_���㣬�t����һ�������͵����ŕr��������������������t����Ԫ�b���醱������һ��λ����ˣ����M����֮�g�ĕr�g�c�㶨�ĕr����ڼ���醱��еĔ�(sh��)ֵ�����ȡ����磺��һ������l(f��)��֮�����t����Ԫ�b�롰30�������ǣ������t����Ԫ�p����֮ǰ���a��30�Εr��Дࡣ
��醱��еĔ�(sh��)ֵ�ǿ��]��6����������߲��M�l���O�õģ��@������l������l��l��l0���p�ُ��L�ӕr��(sh��)ֵ��25���_ʼ���@���r�g�����D���D�^ƽ��λ�ö��M��a���p������Ҫ��ؓ�D�ص�λ�á����ؓ�d�D�خa������ؓ�D�أ����ԣ�ʹ늙C�p��ֻ��Ҫ4�������ϵ�y(t��ng)��u�oֹ�����x��ʼλ�ù�14�����@�r������z�y�������t����Ԫ���ݞ��㲢�D����ֹͣ���� ���]14���\�ӵġ����t��ֵȡ�ӱ�ԓ���У����^�ľ��x�ǹ̶��ġ����^���г��_ʼ֮ǰ��������b�벻ͬ��Ŀ��λ�á�ͨ�^�Uչ��醱��������P������ʹ����(sh��)���ӡ����Ŀ���x��ʼλ������14�����@�r�����Ԅhȥ��醱����m��?sh��)�λ��ʹ�l�ʽ��ͣ�����(sh��)�p�١�
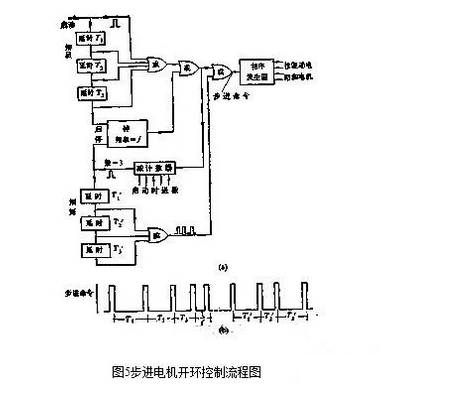
��2����Ӳ�����r �������ϵ�y(t��ng)��Ҫ��(zh��)�еIJ���(sh��)���^�٣���ô���༤�Ŷ��r�����Ô�(sh��)�ּ����·�a�������磬�ڈD5 ��a��С�����_��ǰ�������r�ɳ��m(x��)�r�g��׃���ӕr�r���·�a����������늙C���ٵ���ϵ�y(t��ng)��l�_���IJ��M�l�ʡ����ӽ�Ŀ��λֵ�r�����ú�����ӕr�r���·ʹ늙C�p�١�
ϵ�y(t��ng)����oֹ�������}�_�ӵ� �����ӡ�ݔ��˺��^һϵ��߉�����T���õ�����l(f��)�����ϣ�����l(f��)̎���l(f��)���ļ���׃������늙C���١������}�_ͬ�r�|�l(f��)��һ���ӕr�·�����@���}�_���tT1�r�g�����@���g��늙C�\�ӵ��ڡ������D�Qλ�á����^T1�ӕr��һ�����}�_ݔ���͵�����l(f��)�������|�l(f��)�¼��ӕr�·���@�N�r��һֱ�^�m(x��)�������ӕr�·�������ꡣ��ĩһ���ӕr��ݔ���Á톢�Ӻ��l�r犣��Ժ��l�r����Ժ�IJ��M������r������D5��b����ʾ��
������Ȱ�Ŀ��λ�������˜p��Ӌ��(sh��)�����Ժ�ÿ��(zh��)��һ�Σ�Ӌ��(sh��)���͜pһ����ˣ��@��Ӌ��(sh��)��ӛ������_Ŀ��λ��֮ǰ��Ҫ�l(f��)���IJ��M���(sh��)����߀��Ҫ��(zh��)�еIJ���(sh��)���ڜp���ӕr�·��(sh��)�r���p��Ӌ��(sh��)���a��һ���}�_�� �P���r犲��|�l(f��)��һ���p���·�ӕrT1�������_Ŀ��λ��֮ǰ�����ײ��Ĝp�ٿ������������m(x��)�r�g��׃���ӕrT1����T2����T3���a������������|�l(f��)���a���͵�����l(f��)�����IJ��M����p�����L�������ڣ�T1�����_ʼ���D���D�^ƽ��λ�úͮa��ؓ�D�ء� ���ϵ�y(t��ng)��������ٶȽӽ�ʧ���l�ʣ���ĩ��Ҳ�S��Ҫ20��50���ӕr���@�r�ɱ��ܸߡ�ͨ����Ӳ�����r�H���ڹ����ٶȱ������Ć�ͣ�l�ʸߵò�̫��Ĉ��ϡ����@Щ�����У��ӕr�r�g�܉����o�D�أ��D��λ�����������ɹ����A�y�� |

��Ϣ")



