����
�����ɶ��w�C�w���ˑBģ�M����_�Ǽ��Cе���g�����Ƽ��g�͂������z�y���g��Ӌ��C���g��һ�w�ľC���Ԝyԇ�O�䡣������һ�N���g�\�әC�����w�C�M�ЄӑB���ܜyԇ���P�I�O�䣬��Ҫ����ģ�M�w�C���\���ˑB�����w�C�ṩһ���dz��ӽ����H��ģ�M�h������ģ�M�l�����w�C���w���ˑB�M�Ќ���о������ܿ��죬�ڇ����������ж��кܸߵđ��Ãrֵ��
���Ļ���MSP430���ƺ����OӋ��һ�N�����ɶ�ģ�M����_��������˽o�����΄�Ҫ��
1�� �w�y���w����
ԓϵ�y��Ҫ��MSP430���ƺ��ġ��Դ����ģ�K��늙C����ģ�K�Լ��o��ͨ��ģ�K�M�ɣ���Y����D��D1��ʾ��
�D�_�Č��rλ�������D���a����������̎�����M��̎�������M늙C����PID�㷨�M���{������ֱ���oˢ늙C����ģ�������㷨��ܛ���OӋ�Ќ��r�ɼ����a���ķ�����Ϣ�����F����ϵ�y���]�h���ơ�
2 ��ϵ�yӲ���OӋ
ϵ�y��Ӳ����Ҫ�����������·���Դ�����·��늙C�����͟o��ͨ���·�ײ��֣���ϵ�y�Y����D2��ʾ��
2��1 MSP430�����·
ϵ�y�ĺ��Ŀ��Ʋ���TI��˾��MSP430ϵ�І�Ƭ�CMSP430F149������Ҫ���c�Ǹ߶ȵĹ��ܼ��ɣ����ڔUչ���Ȳ����ɿ��T�����r�������Ԏ����@�����^�Ĵ�����16λ���r��TImer_A��TImer_B֧��PWMݔ�������Լ����г����ĵ����c��Ƭ�ϼ���60 KB��FLASH�惦����2 KB��RAMͬ�r�ṩ256 B����ϢFLASH��64�_���α�ƽ���b���ˆ�Ƭ�C߀���Դ����ھ����̣��o���ⲿ����늉���ϵ�yI��O�ھ��w�������£�P1�����ڽ������D���a���ķ�����̖��P2�ڞ��Д�ڣ�P4������ֱ���oˢ늙C��PWM��̖ݔ����P5�������Ӳ��M늙C�ķ�����̖ݔ����P6����늙C�����Ŀ�����̖ݔ����
2��2 �Դ�����·
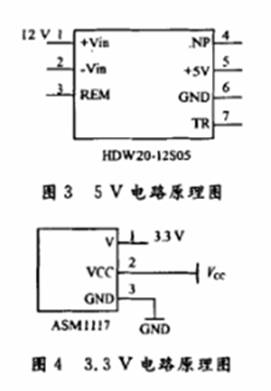
����ϵ�y����3��3 V��5 V��12 V��24 V�Ă�늉��h�������У�3��3 V�o��Ƭ�Cϵ�y��늣�5 V�o���D���a����늣�12 Vֱ���ɽ�ֱ��׃���������o���·��늣�24 Vֱ���ɽ�ֱ��׃���������o늙C��늡�5 V��12 Vͨ�^HDW20-12S05�Դģ�K�õ�����D3��ʾ��3��3 V��5 Vͨ�^AMS1117оƬ�õ����·��D4��ʾ��
2��3 늙C����
���M늙C��������2605AD������2605AD��һ��ȽǶȺ����༚������������늉�DC 24��60 V���m�������5��0 A���¡��⏽��57��86 mm�ĸ��N��̖�Ķ�����ʽ���M늙C��ԓ�����Ȳ���������ŷ�����ԭ�����·�����·����ʹ늙C�����\��ƽ�������]�����Ӻ�������늙C�ڸ��ٕr���ش�λ������߿��_25 600�����D��
ֱ���oˢ늙C���ÿ���������ԓ�������]�h�ٶ��Ϳ�����������IGBT��MOS������������ֱ���oˢ늙C�Ļ�����̖�M�б��l���M���]�h�ٶȿ��ƣ����ƭh���]��PID�ٶ��{������ϵ�y���Ʒ����ɿ����������ڵ����¿����_������D�أ��ٶȿ��Ʒ�����150r��s���~���D�١�
2��4 �o��ͨ���·
ͨ�^�������·�е�RS 232�ƽ�D�QоƬ�����Ԍ��F��Ƭ�C��PC�C֮�g��ͨ�ţ�������-�C��Ԓ��ӵ�ͨ����ɣ�J��˾���a��SRWF-1�͟o��ͨ��ģ�K�������ܷ������w�eС���ڰ��b������MAX3232оƬ���܉����TTL�ƽ��RS 232�ƽ֮�g���D�Q�����Fͨ��ģ�K�cPC�C�M�д���ͨ�š����·ԭ��D��D5��ʾ��
3 �����Ʋ���
3��1 ���M늙C���Ʋ���
��ҎPID�����������㷨���Ρ������Ժá��ɿ��Ըߵ����c���rֵ�OӋ���ס��m���挒�����^�̿����Б�����V����һ����������������^�̵Ć��ӡ��Y�����������p�O���r���̕r�g��ϵ�yݔ���кܴ��ƫ������PID�\��ķe�ַe�ۣ���ʹ���������^���ЙC���������S�����������������ĘO������������ϵ�y�^��ij��{����������ϵ�y�^�����ʎ���@�����a���ǽ^�������S�ġ��e�ַ��x�����Ү����������c�O��ֵƫ���^��r��ȡ���e�����ã����������ӽ��o��ֵ�r������e�ֿ��ƣ��Ա������o���߿��ƾ��ȡ����������ɶ��D�_�Č��H��r���ڷe�ַ��xPID�����㷨�Ļ��A���M���㷨�ĸ��M���Y������ʽPID�����㷨�M��늙C�Ŀ��ƣ����õ��˺ܺõĿ���Ч����
3��2 ֱ���oˢ늙C���Ʋ���
ģ��PID��������ԭ���ǰ�ݔ��PID�{������ƫ��e��ƫ��׃����ecͬ�rݔ�뵽ģ���������С��D�е�F���������H������������ģ���������M�ɵģ��քe�����������M���{����Ȼ��քe���^ģ�����������������������ѵó����������քeݔ��PID�{�����У�������ϵ���M�Ќ��r�ھ��������Ķ�ʹ���،���������õĄӑB���o�B���ܡ�
4 ���YՓ
������MSP430F149��Ƭ�C������оƬ�����M늙C��ֱ���oˢ늙C����Ԫ����ͨ�^ܛ�����̣�������һ�_���������^�ߵ������ɶ��D�_�����^���D�_�����D���ƣ��C���D�_��ƽ�������_�ذ�������o����λ����Ϣ�D�ӣ��ӑB�������ã�ϵ�y�����ԺͿ��ɔ_��������
�����ɶ��D�_���H�ں��ա�����ͺ����ȇ���܊���I�����кܸߵđ��Ãrֵ�������������I��Ҳ�зdz��V���đ���ǰ��������Ҫ�_���˂�Ҫ��ĸ߾��ȡ������ܻ�߀�к��L��·Ҫ�ߣ���Ҫ�Գֲ�и��̽�����о��� |





