���ߣ�Jeff Smoot �� CUI Devices ���ù��̺��\�ӿ��Ʋ��T������
�oˢֱ�� (BLDC) 늙C��һ�N����ֱ���Դ��ͨ�^�ⲿ늙C���������ƌ��F��ӓQ���늙C����ͬ����ˢ늙C��BLDC �����ⲿ���������F�Q��Ҳ������늙C�����ГQ����Ԯa���\�ӵ��^�̡���ˢ늙C���Ќ��H���ˢ����ÿ���DһȦ�Ɍ��F�ɴΓQ���^�̣��� BLDC 늙C�t�o�ˢ�������������OӋ���ԣ��oˢ늙C�܉F���┵���ēQ��ŘO�������Č���� BLDC 늙C�Ļ��A֪�R��̽ӑ�䳣Ҋ�Q������Bһ�N�ɼ�λ�÷�����Ϣ���½�Q������
BLDC 늄әC�Q��Ļ��A֪�R
�Ҋ�� BLDC 늙C���� 3 �����á������c�����@�M����ƥ�䣬���D�ӴŘO��������������IJ�ͬ���������┵��������� BLDC 늙C���D�������D�Ķ��ӴŘOӰ푣������ۙ���ӴŘOλ�ã�����Ч������늙C�ࡣ��ˣ���ʹ��늙C������������늙C�������������Q��ģʽ���@��������Q���ࣩ�Ƅ�늴ň����M��ʹ�D�������w�Ƅ�늙C�S���D 1����
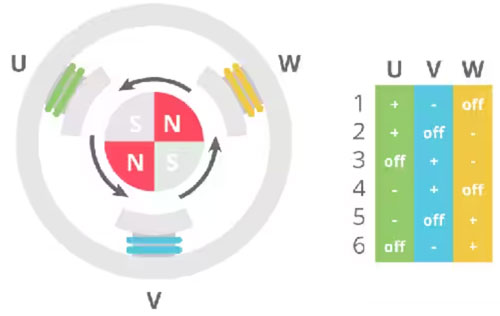
�D 1��BLDC 늙C�� 6 ���Q��ģʽ:���DƬ��Դ��CUI Devices��
����ʹ�������܉���Ч��ʹ늙C�Q���������ʼ�K�@���P���D��λ�õĜʴ_��Ϣ���ԟoˢ늙C�Q���ԁ�������Ч����������һֱ�ǓQ�����ğ��T�x���ڵ�����r�£�3 �������Ҫ������������늙C������Ƕ���˙z�y�D��λ�õĻ���Ч�����������@�ӾͿ����ГQ����늘��еľ��w�܁���늙C����������Ч����������ݔ��һ���ӛ�� U��V �� W ͨ�����z�����ǣ��@�Nλ�÷�������һЩȱ�c���mȻ����Ч���������� BOM �ɱ��ܵͣ������@Щ���������ɵ� BLDC �еijɱ�������늙C���ɱ��ăɱ������⣬������ֻ�Ļ���Ч���������@��늙Cλ�õIJ�����Ϣ���@����Ҫ���_λ�÷������������\�е�ϵ�y�Е���Ɇ��}��
���a�����ṩ���ߵľ���
�ڮ������磬��Ҫ�oˢֱ��늄әC��ϵ�y��λ�Üy�����ȵ�Ҫ���h�h������������ˣ����˻���Ч���������⣬�Ɍ��������a�����c�oˢֱ��늙C�䌦ʹ�á��@�ͽo����һ�����и��M��λ�÷�����ϵ�y�����F����Ҫ늙C��������늙C�����Ӄɂ��������������Լ����b�������һ���������a�������õ��x���Ǻ��Ի���Ч�����������ÓQ�a��ȡ���������a�����Q�a���������ھ��_λ�ø�ۙ������ݔ�����Լ��c늙C���ض��ŘO������ƥ��ēQ��ݔ�����@������� CUI Devices �� AMT31 �� AMT33 ϵ��������CUI Devices �ēQ�a���ǔ���ʽ���������Ԍ��@Щ�����������O�����ֱ��ʺͷ����M�о��̡��@�ӣ����̎������`����M��ԭ���_�l�͜yԇ���p�ٶ��OӋ�еľ��a�� SKU ������
���R�Q��늙C
����늙C��ʩ������r��늙C�����D����֮�������D늙C�r���͕��a�������������D�oˢֱ��늄әC���҂������� 3 ���ݔ���c���D 2 ��ʾ��ơ���ʹ�Q�a������������Ч���������c�oˢֱ��늄әC���_���R�����a���ēQ���Α��c��늄ӄ��R�����y�ϣ��@������һ�������^�̣���Ҫ�õڶ��_늙C���ӵ�һ�_늙C������Ҫ��ʾ�����^�첨�Ρ��@���ܕ����M�r�g�������Ӵ�����ɱ���
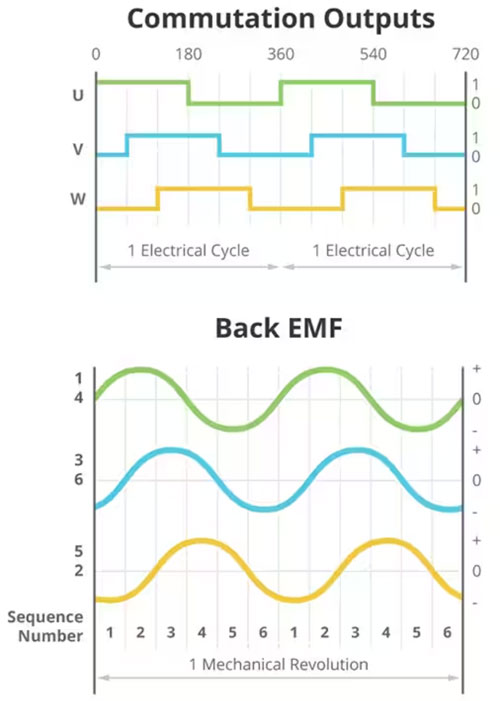
�D 2���Q��ݔ����늙C��λ���DƬ��Դ��CUI Devices��
ʹ�� AMT ��ʽ���a�����܌��F˲�r���R����ֻ��Ҫһ���Դ�����b���a�����Ñ�ֻ������ AMT ���a��������ʼλ�õ��ǃ��늣����l�����R����@�������Ñ��͏ĸ������O���˾��a���ēQ���κ�늙C��늄ӄݲ��ε���ʼλ�á�
�������ڌ��R֮�⣬AMT ���a���ēQ����̖�c늙C�ŘO�Č��RҲ���Ӿ��_�����Q�a�����R늙C��ֻ���O������ʼλ�ã����Q���ε���ʼλ�ã�����������m�����Q���Α��c늙C�ķ�늄ӄݲ�����ȫƥ�䡣Ȼ�����@����r�����ǿ��܌��F�ġ�ʹ�û������������W���a���ĵ��͌��R�������� ��1 늶ȡ���һ���棬AMT ���a�����_�����ߵľ��ȣ�ͨ���� ��0.1 늶��ԃȡ�AMT ���a���IJ��Ώ� U �� W ���Ǹ��ƽ�r�_ʼ�����������еĵ�������B����Ո��ԃ늙C�����̣��˽������ķ�늄ӄ݈D���Դ_���ڌ��R�^������Щ����ԓͨ늡�
AMT �Q�a���ķ����O��
���˿ɾ��̘O���ͷֱ��ʹ����⣬AMT ϵ��߀��Q�����ṩ�˷����O�á����@�Ǵ���������Q�a�������̛]���ṩ�Ī��ع��ܡ����ε��f��ͨ�^�����҂��܉�֪�����a�����S��ԓ�ԺηN��ʽ���D����ʹ�Q����̖ǰ�ơ�ͨ����r�£��Q�a�����b��늙C�ĺ��S�ϡ����@�N��r�£���늙C��r����D�r����늙C�������Q����̖�����B��ǰ�ơ�Ȼ����������a�����b��ǰ�S�ϣ������ϰѾ��a�����D�^���ˣ��F�ڮ��҂���r����D늙C�r����늙C���濴�������a���S���H����형r����D�ģ��ľ��a�������϶��¿������@��ζ��늙C�ŘO�c���a���ŘO�����D�����෴�����D 3 ��ʾ���������������@�N�ɾ����x헵ļ��g���t��Ҫ�����a���P�� U��V��W ͨ���M���������Q�������ͬ�ӵ��΄ա��������ö������в�ͬ����Ҫ��ğoˢֱ��늙C�đ��Á��f���@�N�ɾ��̹��ܿ����e���á�
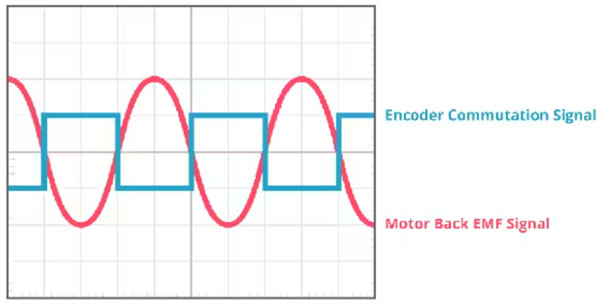
�D 3���Q�����c��늄ӄݷ����෴���DƬ��Դ��CUI Devices��
�Y�Z
BLDC 늙C��ʹ���ڳ��m���L��������Ç���Ŀ��ƻ�·�߾���λ�Ùz�y�������@�늙C�����S�������б��F��ɫ������Ч����������������� BOM �ɱ��������һֱ�����x��Q�������������c�������a���䌦ʹ���⣬���������������o���ṩ������늙Cλ����Ϣ�����^��CUI Devices �� AMT �Q�a���ṩ��һ�N���һ��Q��������ȫ����Ҫ����Ч�����������������a����CUI Devices �� AMT31 �� AMT33 �Q�a�������`��Ŀɾ��̹��ܡ����εİ��b��ʽ�ɞ��Ј�������T���x���籾�����������ڼ��������� BLDC 늙C�Ŀ���v�����҂��������˽�Q�a��ԭ�������@��a���ɞ�һ�N����עĿ���x�� |










