| M32SPIN0280 ���`��늙C���Ƴ���ᘌ�늙C�����Ј��Č��� MCU��ԓϵ�� MCU ���d��Arm®Cortex®-M0 �Ⱥˣ���߹����l�ʿ��_ 96MHz�����ø��ٴ惦������������ I/O �˿ںͶ�N���O��MM32SPIN0280 ϵ�� MCU �m���ڸ��늙C���È���������͑��ð����L�C��ˮ�á�늄�����܇���������L�C �����ȡ�늄ӹ��ߡ����I׃�l���ŷ���C�����{�L�C�ȡ�
1ԓ�ęn��B�����`����� 32 λ̎���� MM32SPIN0280 ��늄ӹ��ߟo�з������Ʒ����� ���� MM32SPIN0280 оƬ�YԴ�Լ�ܛ���f���� ������늄ӹ��ߟo�з������Ʒ����Ĺ����б���

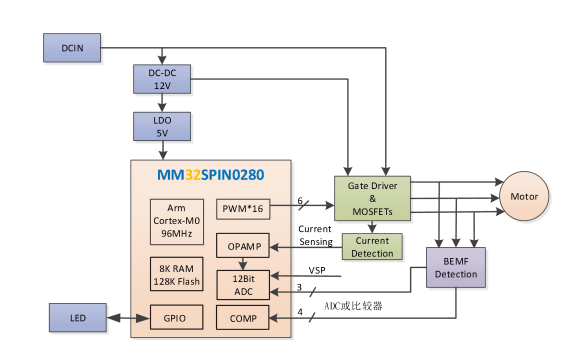
2. Ӳ�������OӋӲ��ϵ�y���ⲿ DC �Դ���, ��������õ� 12V �o Gate driver IC ������ӹ����_�P�ܣ�12V ͨ�^���� IC ݔ�� 5V �o MM32 SPIN ϵ��̎��������������ģ�K��늡�ͨ�^�ⲿ�·�z�y��늄ӄ��^���c��̖���������N��ͬ����׃�� MOS ��������F BLDC 늙C�������Q�ࡣ���� 0~5V ��늉�ݔ�������ٶ�����ā�Դ, �Կ���늙C�D�١� �Ñ��D�ӿ�׃������o���Ը�׃��ݔ��늉�ֵ�����F�o�O�{�١��D 2 �� MM32SPIN0280 ����Ӳ����D
3. ܛ���OӋ3.1 ϵ�y�r���OӋǶ��ʽ������OӋ������Ҫ�ľ��Ǖr����OӋ���oˢֱ��늙Cʸ�����ƵĈ�����Ҫ��Ƕ��ʽϵ�y�еĶ��r�Д��ж��ڈ��У��@����Ҫʹ�� PWM �� ADC ��ͬ���C�ơ��������е��^���c�z�y���� ADC �Д��Ј��С�ADC �IJɘ��� TIM1 �� CCR4 ��ֵһ��ĸ����|�l����D��ʾ
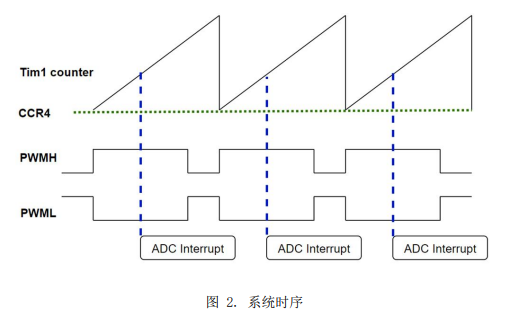
�ĈD�п��Կ������ڱ������� ADC �Д����ں�PWM����һ�£��^���c�ęz�y�ړQ��Y���� �� ADC �Д��Ќ��nj�ͨ���ĸ��늉���һ����^��ɡ�
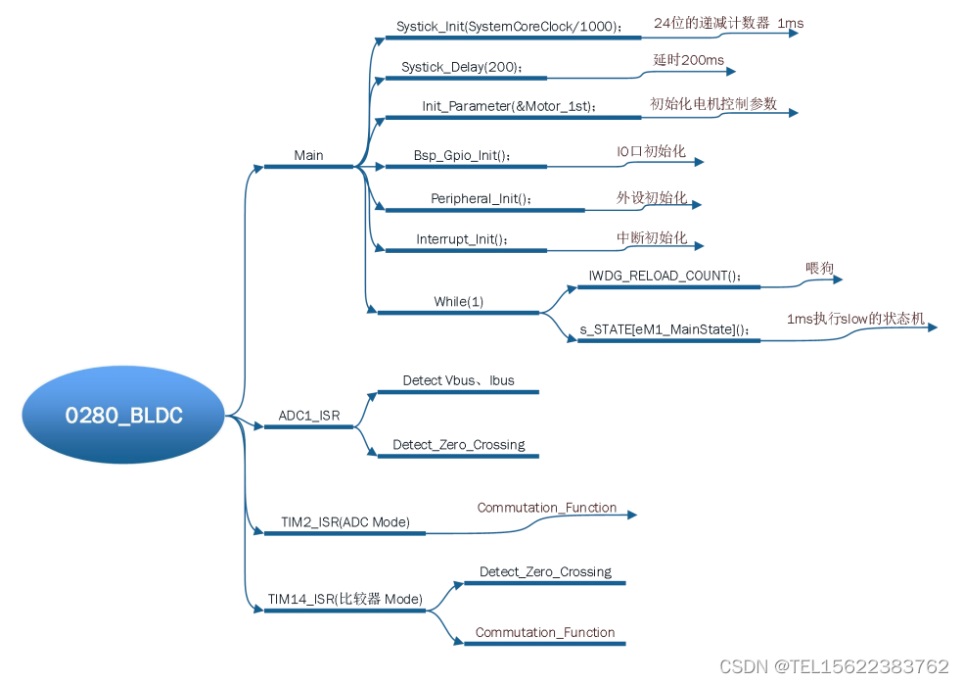
�ɈD��֪��ϵ�y��늏�λ���Ȉ���һ���ӕr�������ȴ�ϵ�y�������_ʼ��ʼ��ϵ�y���O �����������ʹ�܌������Д࣬�� while ѭ�h�Ј���ι���� 1ms һ�ε����٭h��B�C�� 1) ADC ���z�y�^���c�r���� ADC1 �Д������^���c�z�y���� TIM2 �Ј����ӕr�͓Q�ࡣ 2) ���^�����z�y�^���c�r���� TIM14 �Д������^���c�z�y���������ӕr�͓Q�ࡣ
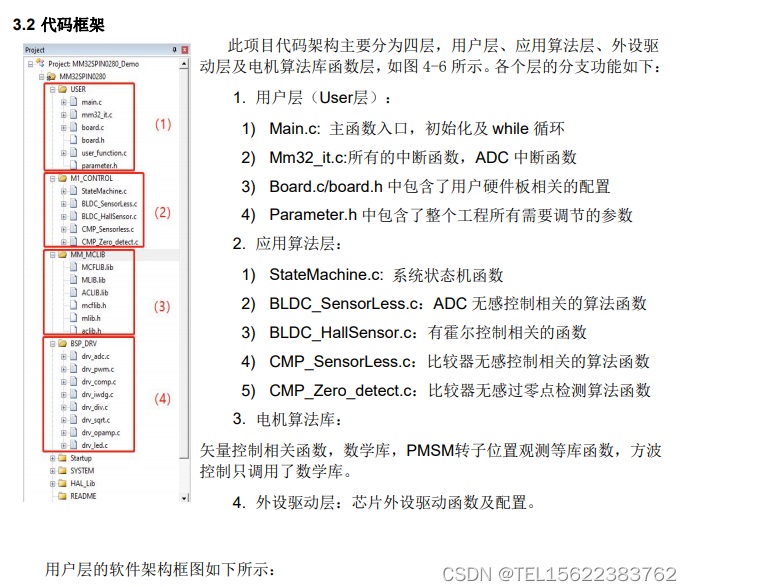
ϵ�y�ӌ���Ҫ�������õ�늙C���O������������ʾ��
3.3 ܛ�����̈D ԓ�����wܛ�������OӋ���D��ʾ���� Main()������Ҫ���е����΄գ�1ms �r�gƬ����� λ���{�ٺͼӜp�������{����ADC �ɘ�����Д����xȡĸ��늉���������D������ֵ�Լ�늙C ���෴늄ӄ�늉����z�y�^���c��TIM1 �a�� 6ch PWM�������� break �ДࡣSystick �Д�Ķ� �r������ϵ�y�r���� 1) ʹ�� ADC ���z�y�^���c�r����ʹ�� TIM2 �Д������^���c�z�y�Լ��ӕr�Q��ܡ� 2) ʹ�ñ��^�����z�y�^���c�r������ʹ�� TIM14 �Д��M���^���c�z�y�Լ��ӕr�Q���
|