���o��������g�������칤�S���e��ǧ���������C���˞��҂�������S����ṩ�˱������C���ˌ��F���������Ӱ��@����Ҋ�������Ƿ�˼���^�C����ϵ�y��Ό��F��˾��_�����ٺ͏�����\�ӣ��������ͨ�^늙C����ô��ϲ���ش����_��
�C����������ģ�±���������еIJ��������b�ڴˣ����Ĺ�����Ҫ����ͨ�^ij�N��ʽ��λ�ƻ����D���{��λ�úͷ����@Щ�\��һ��ͨ�^늙C���F��
���y�ęC���ˑ��È�����Ҫ��ע�ڙCе�ӣ����ֱ۲ٿv����͎�ѭ�h�������F�����È����t���εö࣬�������C���D�ʙCе�����D�����_�������������ܕ��@Ӡ�ذl�F��늙C�Ļ�������������A���^���L�Ⱥͱã������H�υs��ɢ���Һ��������Ҫ���á�

�e�����f���Cе���P���еğoˢֱ�� (BLDC) 늙C����D 1 ��ʾ��ͨ���������D���D�Ӻͱ����oֹ�Ķ��ӡ��������̖ʹ�����ϵľ�Ȧ�@�Mͨ��܉��γɴň����Ķ��a��������ʹ�D���\�ӣ��M�����D�Cе�ۃȵ��P��������ʹ�������̖���Cе�۲��H�H���\�ӣ����܉����ض����ٶȡ�λ�þ��Ⱥ�Ť���\�ӡ�
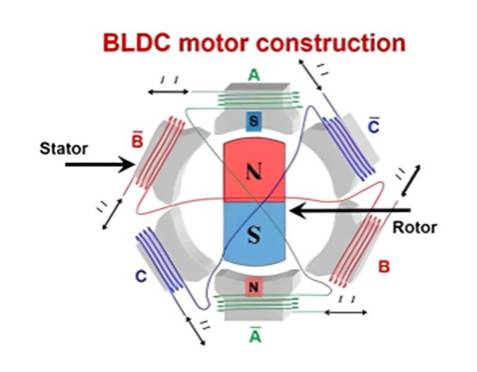
�D 1��BLDC 늙C�Y���M����D
늙C�������һ���C����
�����漰���\�ӵľ��_�͏����΄��⣬������ (MCU) �ͼ���늙C������늙C���ư댧�w���M�����ڃ����C���˵��\�ӷ�ʽ����Ҫ���F�@һĿ�˅s���R�� 4 ������
���� 1�����F�˙C�f���İ�ȫ��Ҫ�����
�^ȥ�����ڰ�ȫ�Կ��]����͙C������Ҫ������x��ͨ���nj��C���˷��ڻ\����Ԅӻ��̶ȵ������Ҫ���o�ܵ��˙C�f���ͻ��ӣ��f���C������������߹���Ч�ʣ�����Ҫ�܉�_����ȫֹͣ����ȫ�ٶȡ�Ť�غ��\�ӿ��Ƶ�늙C��
C2000 32 λ TMS320F28P650DK MCU �������ڎ����M�㰲ȫ��Ҫ����l�]�����P��Ҫ�����á��@Щ�����Ĺ��ܰ�ȫ�Խ��^�J�C�����Լ��������\��İ�ȫ���O���Ķ��������χ��H�˜ʻ��M�� (ISO) 10218 �˜ʵ��OӋ�����l�V��ģ�M�ˣ�DRV8353F �����ܖŘO��������ͨ�^�� TÜV SÜD �J�C�ļ��g���������̎����F�䰲ȫĿ�ˡ�ԓ֧���ļ���ָ�����̎���ɸ��� IEC 61800-5-2 �˜ʌ��F��ȫŤ���P�]������OӋ���E���oՓ�� MCU ߀�ǖŘO����������ijЩԪ�������Ժ����OӋ�^�̣����F���ܰ�ȫ��늙Cϵ�y�� 32 λ TMS320F28P650DK MCU �������ڎ����M�㰲ȫ��Ҫ����l�]�����P��Ҫ�����á��@Щ�����Ĺ��ܰ�ȫ�Խ��^�J�C�����Լ��������\��İ�ȫ���O���Ķ��������χ��H�˜ʻ��M�� (ISO) 10218 �˜ʵ��OӋ�����l�V��ģ�M�ˣ�DRV8353F �����ܖŘO��������ͨ�^�� TÜV SÜD �J�C�ļ��g���������̎����F�䰲ȫĿ�ˡ�ԓ֧���ļ���ָ�����̎���ɸ��� IEC 61800-5-2 �˜ʌ��F��ȫŤ���P�]������OӋ���E���oՓ�� MCU ߀�ǖŘO����������ijЩԪ�������Ժ����OӋ�^�̣����F���ܰ�ȫ��늙Cϵ�y��
���� 2��ͨ�^��ɢʽ늙C�ܘ��p�p�������������������ͳɱ�
늙C����O�����IJ��ÿ��ƹ��D��ֱ�Ӽ��ɵ��C�����P���У��@�����ڜp�p��������������������ϵ�y�ɱ����@һڅ�ݴ�ʹԪ���������������_�l���ڸ�С�ɵļ����·���b�ȼ��ɸ���ܵĽ�Q���������g����ҲҪ��߂���ߵĹ����ܶȺ��ԴЧ�ʡ�
����扈�Ч�����w�ܣ��� LMG3422R050�������˖ŘO���������Ԍ����ʼ�Ч����ߵ� 99% ���ϣ��Ķ�ʹ����늙C�p�ٻ�������ɢ���������������rͨ�����O�ͽ^�����a���ӿڣ����� TMS320F28065 �� MCU ��ϵ�y���Ԯa���ֱ��ʞ�Ƥ�뼉���}���{����̖���@Щ���Ԍ��F�ˌ�������ÿ��늙C 10 ���l��|�p�ٵ������Cе�۹��ɗl�������ڴ�������ʹ�� MCU �� GaN ��Ч�����w�ܣ�ʹ�OӋ�ˆT�܉�ͨ�^��̫�W������հl������ DP83TG721�����ӆΌ���̫�W���܁탞���о��B�ӡ�
���� 3�����F���_�\���΄��Ԅӻ���Ҫ���ߵľ��Ⱥ͜ʴ_��
�aƷС�ͻ����S�����õ�늙C�x���ŷ������M��oˢֱ��늙C���a����һ��Ӱ푣�����늙C���ƺ�λ�÷������s���S֮��ߣ��Ա��܉F�c�@ЩС�ͮaƷ�M�л��ӵľ��_�\�ӡ��댧�w����ʹ���F�aƷС�ͻ�����ĸ��߾��ȳɞ���ܡ����磬 AMC3306 ��������������С� 50µV ʧ�{늉��ͼ���ʽ�Դ�����@Щ���Լ���һ�����b�У��ȿ�����߿��ƻ�·�ľ��ȣ��ֿ��Կs�pӡˢ�·������w�ߴ硣
���� 4�������ԴЧ�ʣ����F늳ع�늵��Ƅӑ���
�C���˲���ֻ�ǹ̶���һ̎���䑪����څ�����Ƅӻ������ڎ����Ԅ��f�Ͱ����Ͱ�ȫ̽�����Ρ���ǰ��δ�����ڸБ���̎���͌��r���Ƒ��õİ댧�w��Ҫ�ڸ����ܺ��ԴЧ��֮�g���Fƽ�⣬�Ķ��_��������늳�ʹ�É����Ϳ��ܵ��г̷�����
���F���ԴЧ�ʲ���һ��ʮ�֏��s��Ҳ����Ҫʹ�ö�������Ԫ���ď��s�OӋ���������磬�� MCT8316A �@�ӵĆ�늙C����������ͨ�^�p�ٙC�����й���Ԫ���Ĕ�������Ч�ز���С�ͱú��L��늙C���@��߶ȼ��ɵ�����������������������댧�w��Ч�����w�ܣ����γ�����ݔ��늙C����İ���ʼ����Լ�һ�����ֺ��ģ��o�辎�����a���Ɍ��F���ε�����늙C���ơ�
늙C���Ƶ�δ���lչǰ����Σ�
δ���ęC���˶������������������p����ɽ��쿴����������ɵ��΄� - �l���ں�������ĺ��������I������δ֪��̫����ð�U�������OӋ���ܕ�����Խ��Խ���M�Ă������������҂�Ŀǰ�������ļ������_�ͳ������g�����^ȥ���о��C���˵��F�ڸ���ز�������ܛ���Ľ�Q�������҂��c�C���˽����ķ�ʽ�������ܰl��׃�������L���Ե�����ʹ���܉�ͨ�^�Z����ҕ�X���_�����H�H��˼�S�����ɿ��ؿ��ƙC���ˡ����@�N��׃�^���У��S���C���˼��g�͑��õIJ���lչ�������\�������늙CҲ�ݱز���lչ�� |





