������ҪԔ����BBLDC늙C�����������������������D�ӵIJ�λ�o��ƥ����@�M���Դ����ÿһ���r��ֻ�o늙C�����@�M�еăɻ�ͨ늣��ǘ�ÿ���@�Mͨ��120늽Ƕȡ���һ��늽Ƕȣ�360�ȣ����ڕr�g��������N��һ�ӵĹĄ�M�ɣ���˱��Q������
�����������Q��ٿv��
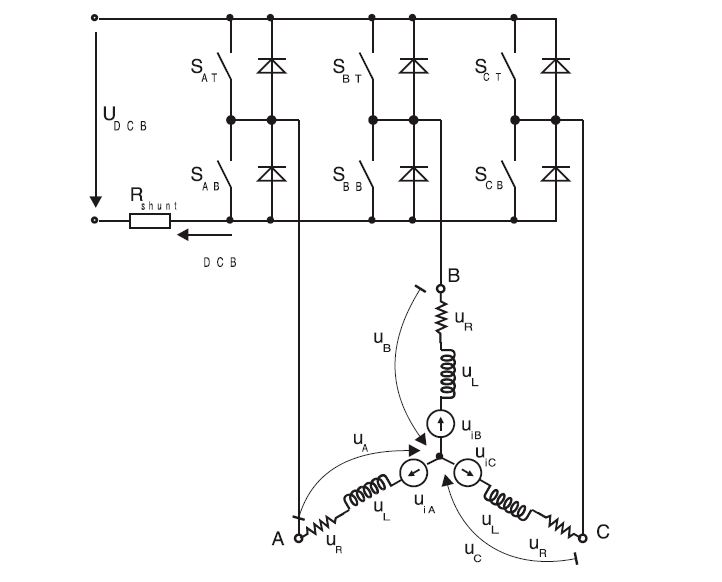
�D1�oˢ늙Cֱ���늙Cݔ������һ���ֺ�ϵ�y�ܘ��D
�����Q��������һ�N����Y����BLDC늙C�ij�Ҋ��ʽ ���������Q���У�BLDC늙C�x�Ã����ģʽ���S��r�̃H�Ѓ�����ͨ����һ��������������x�ă����@�Mͨ�������D�ӵIJ�λ�Q�ߣ��D�Ӳ�λ�Ă��п�����λ��������λ�^�y���õ����иБ������������͟o�Б�������������
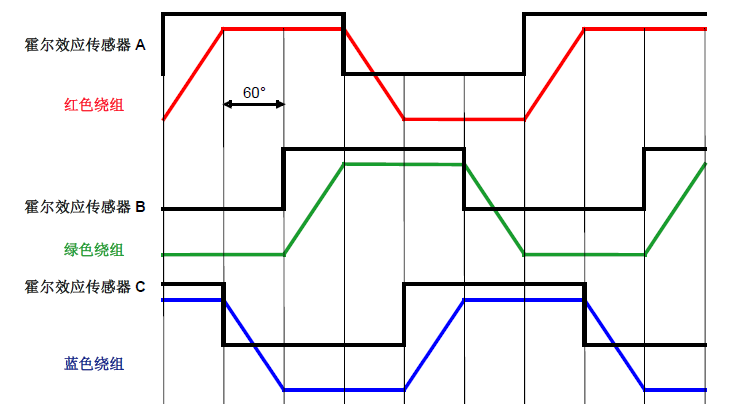
��1������������������120�ȱ鲼���ٿv�������Q�����ԭ��
�tɫ�@�M��A�� �Gɫ�@�M��B�� �{ɫ�@�M��C
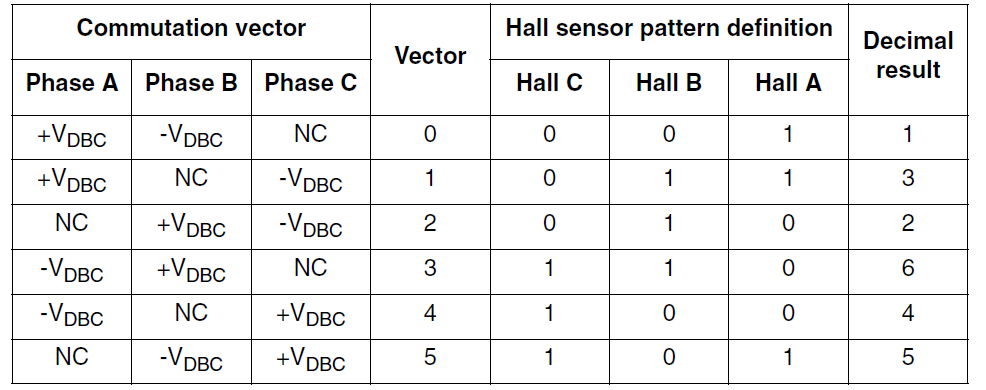
HallA��HallB��HallC���������������������b��늙C��һ�ӵIJ�λ�����ڙz��������������@�M��A/B/C�����D�Ӳ�λ����늙C�\��ȫ�^���У������ĴŸо�Խ�^�������������Б���ݔ����1�����෴��ݔ����0�������3��������������Q���b��360��늽Ƕȣ���늙C�\��һ��늚��O�����ڕr�g��360���r��ÿһ���������������}�_��̖���a��2�����D��һ���a��6���}�_��̖���D�����Б����Ƿֲ�����ģ����ÿһ�����Dǡ�����60��늽Ƕȣ��@����늙C2�ΓQ������늽Ƕȡ��������m�d�������������һ�ӵ��}�_��̖���D�r�̣��S��o�������@�M���Դ��늙C�Ϳ��Է������\��������
������늙C형r��{�ٱ�
��2���o�Б����ٿv�������Q�����ԭ��
�r�tɫ��A��BEMF��Gɫ��B��BEMF���{ɫ��C��BEMF
��D���@ʾ��ÿһ���^�Σ�60��늚��O��Ƕȣ��Ȍ�δ���Դ���@�M�ϵ��Ը�늄ӄݹ���늉��_չ�z���Ը�늄ӄݹ���늉��v�����A�ġ����^���c���r�����z�^���c�a��������ϵ�y��֪�D���@�r������60��늚��O��Ƕȅ^�εĈA�����g����һ�ΓQ��Ҳ����ʮ��늚��O��Ƕȡ�Ӌ�r���o�ÿһ���^�Σ�60��늚��O��Ƕȣ��ĕr�g��T60�����z�^���c�r��Ӌ�r�����b܇һ����ֵ��T60��һ����A�Oֵ��Ӌ�r���a��Ո�r������ɽK�ಢ�����һ�ΓQ�ࡣ����ƴ�ʩ�Q֮��BLDC늙C�ğo�Б����ٿv��
ᘌ�BLDC늙C�ğo��λ�������ٿv���ж�N���ӷ�ʽ ��z��D�ӵIJ�λ�����磬BEMF�y��������ͨ���y���������N����ϵ�yܛ��������̖�^�y������������̖���뷨�ȡ��F�A�Α��õı��^�����BEMF���������z�������Ը�늄ӄ��^���c����ɓQ�࣬�e�ĵğo��λ���������ƴ�ʩ�����º���¹�Ŀ���̽ӑ��
�±�չ�F��ֱ��늟oˢ늙C늙C��������������D��ʾ1����ÿһ��늚��O�����ڕr�g��360�ȣ��������Q������ƥ����Դ�_�P��r������ķ����c�D�Ӳ�λ���P��
֮�ϱ����oˢ늙Cֱ���늙C���������Ļ���ԭ���� |