BLDC��ɶ��
1��BLDC�Q�oˢֱ��늙C�����c���Ǜ]�ГQ���������Ķ������~���@�ɵľ�Ȧ���D���������w��
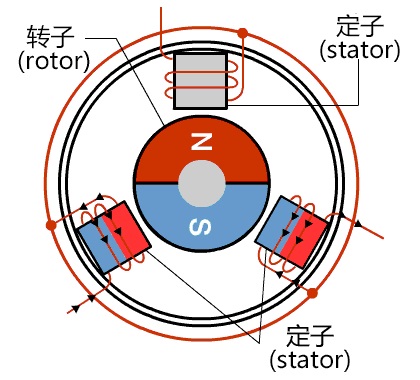
2��BLDC���ƣ�Ҳ�����ۂ����f�ķ������Ʒ����֞��иПo�У��и��Ҋ���ǻ������ž��a�����o����õ��Ƿ�늄ӄ��^�y��
��������
��������ÿ��ֻ�o����늙C�ă���ͨ늣�һ���ҿա�
���˷�ֹ��·�����ɂ����ʹܿɲ���ͬ�r���_��
������_֮��Ĵň�����
�������ֶ��t��ͨ늵Č��w�a���Ĵň��������֪������U-W��ͨ�r���ɂ���Ȧ�a���Ĵň��M�кϳɣ����Ǵň�ʸ���������w֮�g������ͬ����⣬����������ԭ����
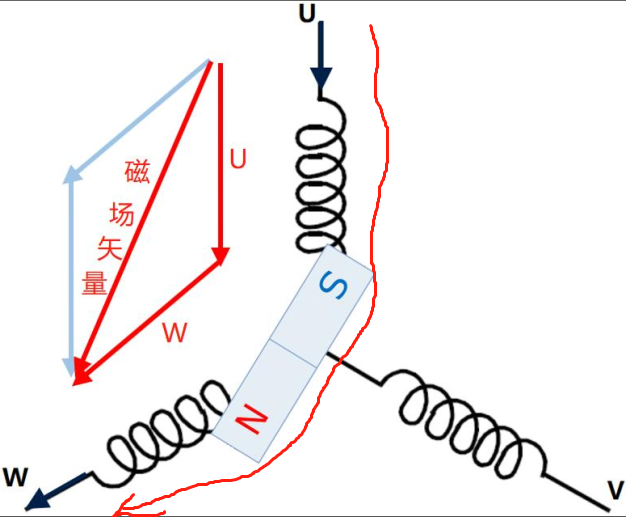
��������N�M�ϣ�
���������Q�ࣺ
늙C�����D
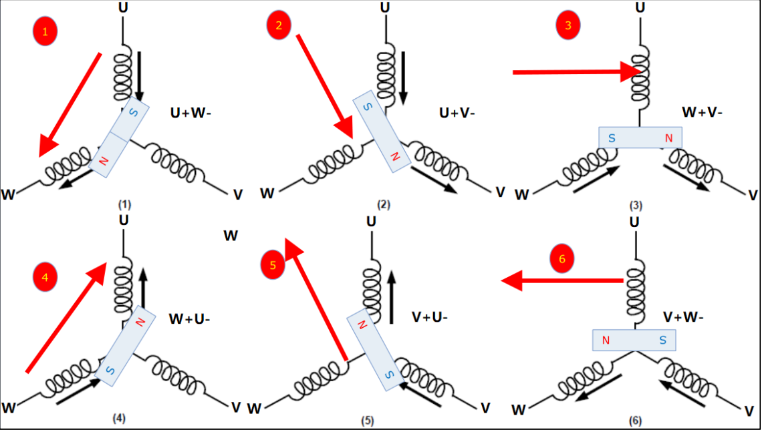
형r��҂�����������r��҂��з��D
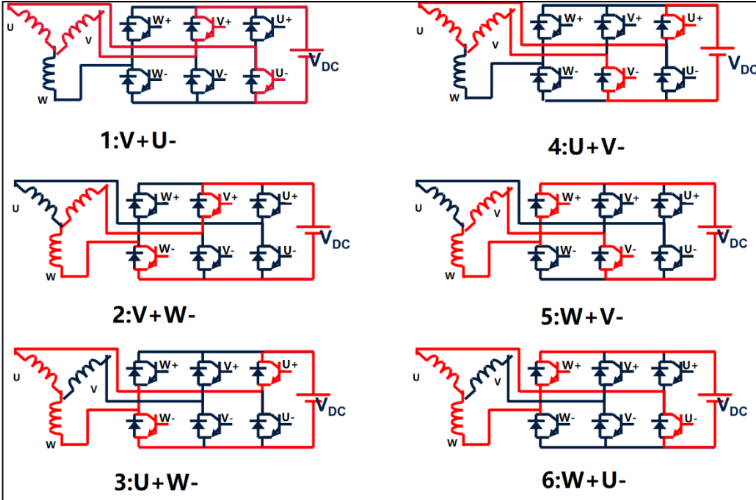
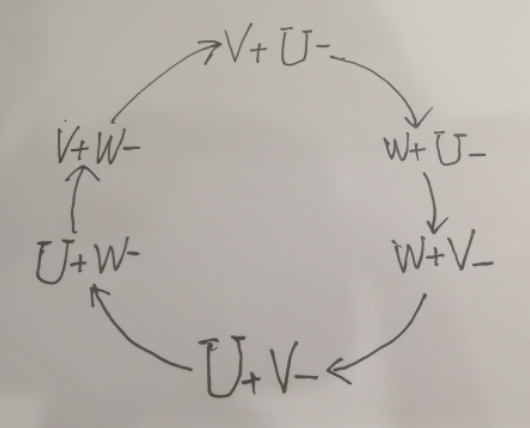
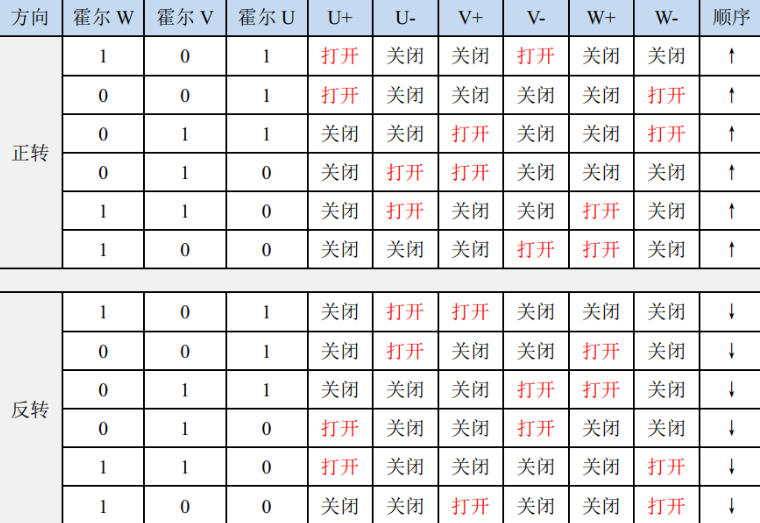
V+U- W+U- W+V- U+V- U+W- V+W- ����һ�����c������UVW�@�����׃���������D��W+ W+ U+ U+ V+ V+��ؓҲ���@�ӵġ�
��������BLDC
��������һ��λ�Ùz�y�����ã����҂����D���D���Ă��ȅ^�ˡ�
����ԭ����������Ԫ��
���Ԯ��D�����D�ĕr������ݔ�����@ô׃��
�������120��[�ŵ�3������Ԫ�������@�ԓ��ֻ��һ���O������
�������D���D��
546231�����ʲô����
�@�ɲ����ȅ^��������
�䌍�w������҂���Ҫͨ�^ܛ����늙C�M�п��Ƶġ�
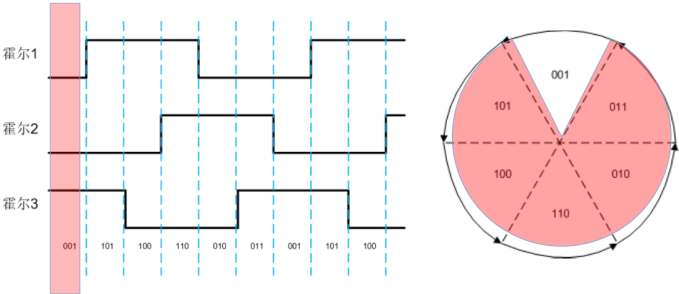
3�������M�ɵ���һ��3bits���Ķ��M�Ɣ���101��001��011����
�����҂�����������ļ��O������������Uֵ��bit2��λ��Vֵ��bit1��Wֵ��bit0
�������҂��������һ������ֵ��

��546231���������ĕr�����Ļ���ֵ��
����ֵܛ���ό��F��ʲôҪע��ģ�
�������������ߵ��ƽ��̖����c��ʲô�r���x�@��ֵ��
���h�����Д���e����ʲô�������nj��r�ԣ��e���D���\�ߵĕr�������������̎�픵�������Q����r���D���ϲ�ȥ������
HallDate = 0;
HallDate = U<<2|V<<1|W<<0;
����������λ��ɵ��\�㣬��Ҫ�üӜp�˳�����C��λ�\�������ġ�
�@���r�����x����HallDate��һ��0-7�Ĕ�����ô߀��0��7��
0��ζ���]�x������ֵ��7��ζ������ֵ�ܵ��˸ɔ_���������dz����}���s�o�z�飡
������׃�·�İ����ɶ
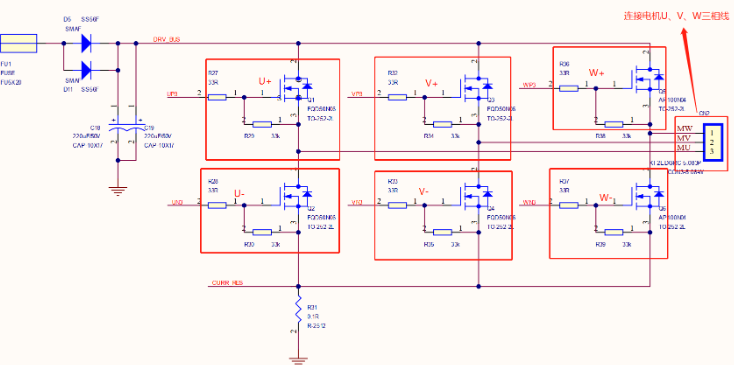
ע���ˣ������ָ�������������ʹܣ�����UVW�������U+U-�@����һ�����
�ۂ����f�� �Ϙ�ی�ͨ ���� ��ی�ͨ һ����ָijһ�����ġ�
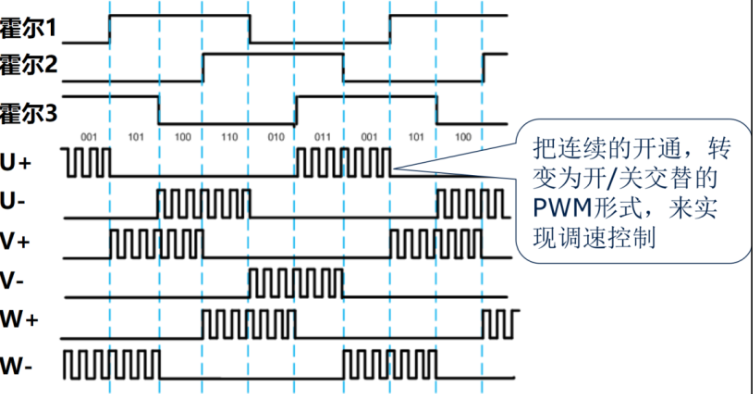
��ɶ��PWM��
������������⣬ֻҪ���C���ʹ�����۴��_�����ˣ���ô������PWM���أ�
��鮔�҂�ֱ�Ӱ��Դ���d����Ȧ�ϣ�Ȼ�������mһ�Εr�g���@������늙C�ρ����Ժܸߵ��ٶȿ��j���@߀Մ�ο��ƣ�
���������Ͱѳ��m�ĸߵ��ƽ��Q��PWM����PWM���{�ƣ��ܷ���Ŀ��ƾ�Ȧ��������M�������D��Ť��߀���D�٣�ͨ�^�{��ռ�ձȣ���
��Ҋ��PWM�{����ʽ
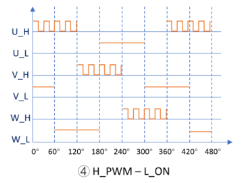
�ۂ����e�˴��a�ĕr��������ʲôH_ON-L_PWM��H_PWM-L_ON����
�@����ɶ��
�䌍����PWM�{����ʽ�����治���f��Ҫ��늙C�M�и��õĿ��ƣ�Ȼ�������PWM����PWM�{���ķ�ʽҲ�кö�N��
����Փ�ϑ�ԓ��5�N�����ۂ�ֻ�f�Ҋ�����N
H_ON �C L_PWM��ijһ���ϰ��ʼ�K���ָ��ƽ��Ҳ�����ϰ���_��ͨ������һ���°��ʼ�K��PWM��ʽ����
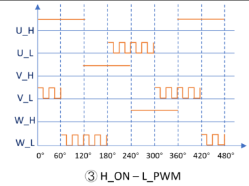
H_PWM �C L_ON�� ijһ���ϰ��ʼ�K��PWM��ʽ���ƣ���һ���°��ʼ�K���ָ��ƽ��Ҳ�����°���_��ͨ��
H_PWM �C L_PWM���ϰ����°������PWM��ʽ���ƣ��@�N���Ʊ���������^����t�ړQ���˲�g���܌��¶�·��
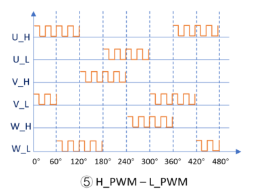
ע��PWM���l�ʱM��������20K���ң�һ����鹦�ʹ����ƣ���ʮ����ߴ��C���ĸɔ_��
BLDC����ȱ�c
1 �������ưl�����p�Ĵ����l���Ǻ����ƽ�������ȵģ�������늙C�����ֻ���_���P�ɂ���B����Ȧ������}�ӷ�ֵ����ܴ�
2 �a���Ĵň����B�m�������S�ģ���ɺܴ���D���}�ӡ�������ӣ��a������ʹ���dоƬ���߂����������½���
��ȻҲ�к�̎��Ӳ���ɱ��͡������㷨���Ρ�
��������������������������������
����������Ğ鲩��ԭ�����£���ѭ CC 4.0 BY-SA ����f�h���D�dՈ����ԭ�ij�̎朽Ӻͱ�����
ԭ��朽ӣ�https://blog.csdn.net/weixin_43824188/article/details/129547019 |










