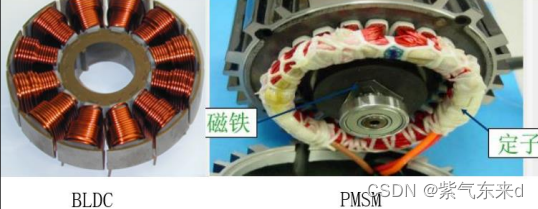
������Ʒ�ʽ�Ͳ��Σ�
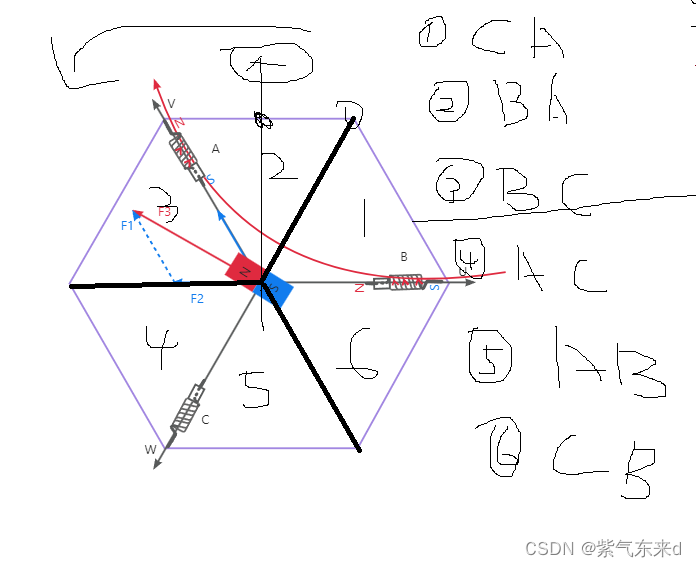
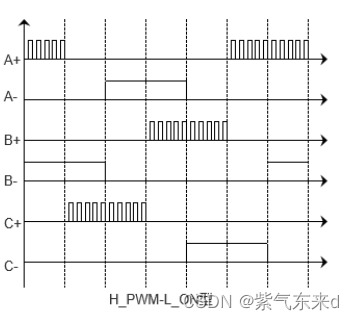
�����(q��)�ӣ���ÿ���Q�����ڃ�(n��i)�������@�M�е�������ГQ���̓ɂ���B(t��i)���γɾ��β���ͨ�����������Q����ÿ60��늽ǶȓQ��һ�Σ��Ķ��a(ch��n)���D(zhu��n)�ء�
���Ҳ��(q��)�ӣ������@�M�����^�������ģ�M���Ҳ���ʽ�����ֵ���l�ʺ���λ���c�D(zhu��n)��λ�þo�����P��
ͨ�^�ň�������ƣ�FOC�����g���F(xi��n)������ľ��_���ơ�
�Cе���ԣ�
�����(q��)�ӣ�
�D(zhu��n)��ݔ������������ГQ�ķ��B�m(x��)�ԣ�Ť��׃�����A�S��D(zhu��n)���}���^���������ڵ��ٕr�������@�����܌�����Ӻ����^�ߡ�Ч���c�p�ģ������\�Еr���ܕ��������ز������늴Ÿɔ_���Fо�p�����Ӷ�����Ч�ʽ��͡� ���Ҳ��(q��)�ӣ�
�D(zhu��n)��ݔ������������c���܉�Eͬ�����a(ch��n)�����D(zhu��n)�ظ��ӽ���������B�m(x��)�;�������D(zhu��n)���}��С��ƽ��(w��n)�Ժ;��ȸ��ߣ���Ӻ��������͡�Ч���c�p�ģ�ͨ�^��(y��u)����������ƣ����w����Ч�ʸ��ߣ��e���ڌ��ٶȷ�����(n��i)�܉��^�ߵ�Ч�ʣ����Ҝp���˲���Ҫ���F�p���~�p�� ����ϵ�y(t��ng)���s�ȣ�
�����(q��)�ӣ����Ʋ����������Σ�һ��ʹ�û����������z�y�D(zhu��n)��λ�ã��������OӋ�ɱ��^�͡����Ҳ��(q��)�ӣ���Ҫ���s��FOC�㷨�����rӋ�㶨�����ָ���Ը�ۙ�����Ĵ�机��D(zhu��n)�أ�ͬ�rҪ�����λ�Â��������美�a�������D(zhu��n)׃�������ṩ�ʴ_��λ����Ϣ�����¿���ϵ�y(t��ng)Ӳ����ܛ�����s����ߣ��ɱ�Ҳ�S֮������ ���È��ϣ�
�����(q��)�ӣ��m���ڵͳɱ������D(zhu��n)���}�Ӻ�����Ҫ�ߵĹ��I(y��)�O�䣬����������С��늄ӹ��ߵȡ����Ҳ��(q��)�ӣ��V�������ڸ߶˾����I�����ŷ�ϵ�y(t��ng)���C�����P��(ji��)��늄���܇�(q��)��늙C�����պ����Լ����N�߄ӑB(t��i)��������Ĉ��ϣ������m�ό��ٶȿ��ƾ��ȡ��D(zhu��n)��푑��ٶȺ�Ч���Ї���Ҫ��đ��á� ���ܱ��^��
�������ܣ����߶����ṩ���õĆ���Ť�أ������Ҳ��(q��)���چ����A�οɸ������ؿ���Ť�������������ڜp�ٛ_��ؓ�d���ӑB(t��i)푑������Ҳ��(q��)���������ƽ�����ƣ��ڿ��ټӜp���^���б��F(xi��n)����(y��u)������Ч����ϵ�y(t��ng)�ĄӑB(t��i)���ܺͷ�(w��n)���ԡ�
���Y���f�������(q��)�ӟoˢ늙C�����Ҳ��(q��)�ӟoˢ늙C����Ҫ������(q��)�ӿ��Ƽ��g���ɴˎ�����늙C�\�������ϵIJ�ͬ���Ñ�������(j��)���H���õ������x�����m�ϵ��(q��)�ӷ��������ɱ������ܡ�Ч�ʺͿɿ��Ե����ء�
|

��Ϣ")








