���M늙C�������������?
���ڲ��M늙C���ڽY�����Ρ����Ʒ��㡢��ȫ�Ըߡ��ɱ��͡�ֹͣ�r�����ش��ڵ�����r�²���Ҫ�p�ٙC�Ϳ���ݔ���ܴ�����ء����ֱ���oˢ���ŷ�늙C,���M늙C����Ҫ���s�Ŀ����㷨Ҳ����Ҫ���a��������r�¿��Ԍ��Fλ�ÿ���.�����ںܶ�Ҫ�_��λ�Ĉ���,�������ںܶ���Ҫ�Ƅӿ��ƵĈ��϶����õ����M늙C���Ԅӻ����ơ����ֻ����a��3D���t����W�ȱ����I��.
���M늙C��һ��ȱ�c�����������^��,�e���ڵ��ٵĕr��.
������Ҫ���ԃɂ�����һ�Dz��M늙C������ֱ���(�����A�S)��һ�����ǁ����ز����}���{��(PWM)�IJ���ģʽ����.
����Ƿֱ��ʺͼ���
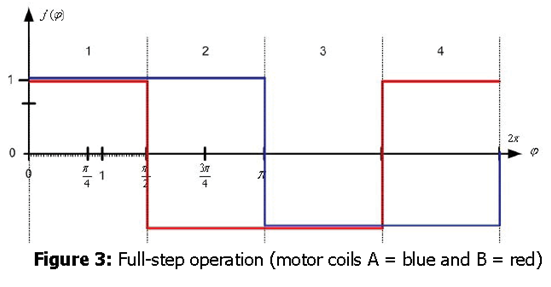
���͵IJ��M늙C��50���O(Poles),����200������(Full Steps) ,Ҳ����������r��ÿ��1.8���Ƕ�,늙C���Dһ����Ҫ360��.����Ҳ��Щ���M늙C�IJ���Ǹ�С����������Ҫ800����.��� �@Щ���M늙C�������������߰벽ģʽ��,ʸ������ṩ�o늙C��ȦA(�{ɫ)�;�ȦB(�tɫ)���������D.����������һ������360�������.�ڈD3�͈D4�к����@����늙C��Ȧ��90��Q���c̎��Ȧ���Ҫô��������(full power)Ҫô�Ǜ]�����.
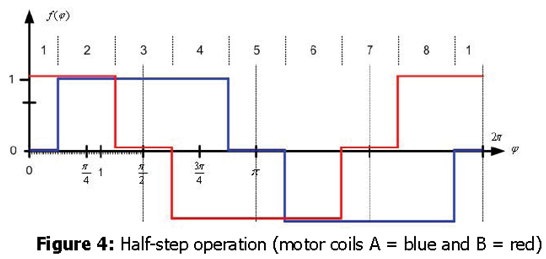
һ�����ڃ�(360��)ÿ�M��Ȧ��4����������8���벽����.
Ҳ����50���O�IJ��M늙C��Ҫ50��늚ⲽ�������һ�ܵęCе���D(360��)
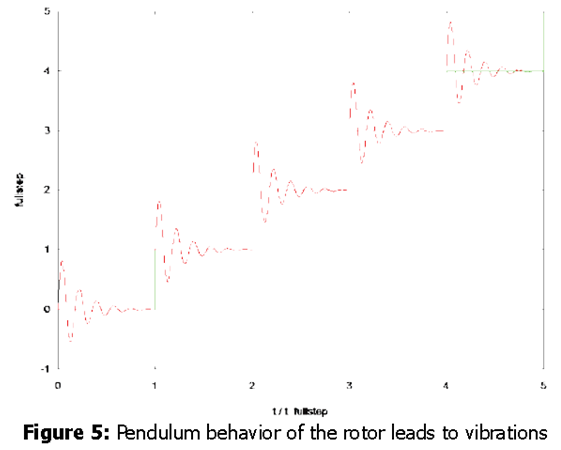
���µ�ʸ�������������ݔ��֮��,늙C�D���������µ�λ��ָ���Ƅ���һ���������߰벽��λ��,���}���������� ���µ�λ���c�܇� �D�ӕ��a�����{����ʎ,���һ������Cе��Ӻ�����. ���˜p���@Щ����,�Ȳ����ֵ�ԭ�������˳���,��һ�������ָ�ɸ�С�IJ��ֻ���������,���͵ļ��֔���2(half-stepping)��4(quarter-stepping)��8��32��������ļ���
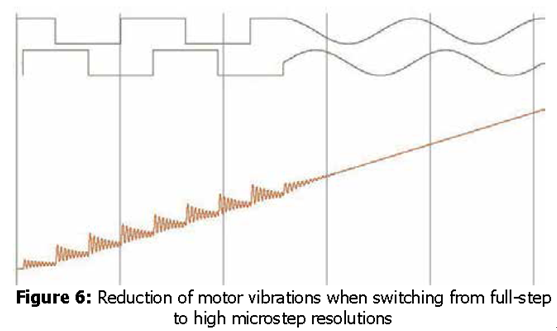
늙C���Ӿ�Ȧ�����������������(Full current)���߾��Ǜ]�����,����һ�����g�����ֵ,�����4���������(4full steps)���ӽ���һ�����Ҳ��Π�.�����w���D��λ��̎��2������λ��֮�g(�ϳɴň�λ��).���ļ��֔�����������A/D��D/A�����Q��.TRINAMIC���ṩ���ӺͿ����������_��256����(8bit)���ü��ɵ����Ҳ����ñ���,���M늙C���Ԍ��F�dz�С�ĽǶȿ���,�D6���������_����λ�Õr��IJ���
�ز���PWMģʽ
��������ӵ�����һ����Դ�ǂ��y�Ĕز���ʽ���}���{��(PWM)ģʽ,���ڱ��^�ֵIJ���ֱ����Ǯa����Ӻ���������Ҫ����,�҂�ͨ����ҕ�˔ز���PWM�����Ć��}.
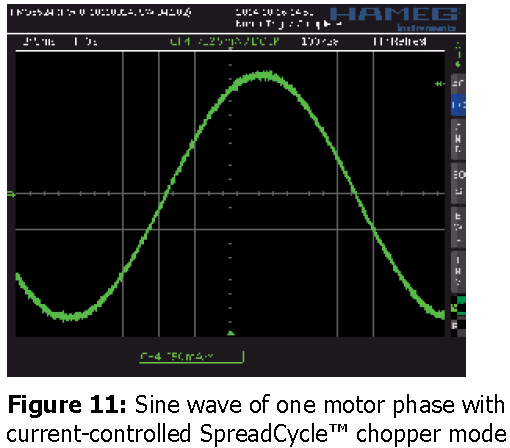
���y�ĺ㶨PWM�ز�ģʽ��������Ƶ�PWM�ز�ģʽ,ԓģʽ�ڿ���˥�p������˥�p֮�g�Ђ��̶��Pϵ,�������ֵ�ĕr��,����ŕ��_��Ҏ����Ŀ�����,��K����ƽ�������С���A��Ŀ�������,��D7��ʾ
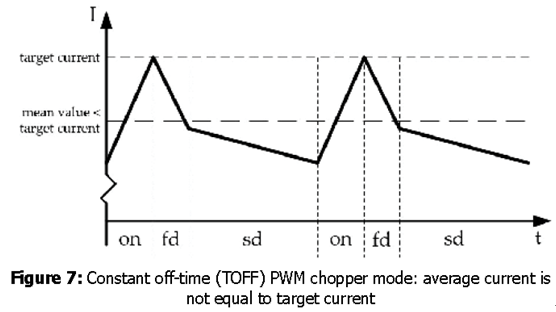
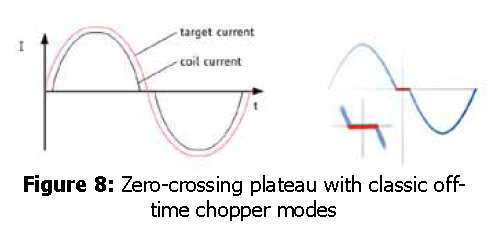
��һ������������ڃ�,��������׃�r �����Ҳ��^��̎�Ђ�ƽ���^����,�@����Ӱ��ں̵ܶ��^���ڃȾ�Ȧ������������,Ҳ����늙C�˕r�����͛]������,�@�͌�����늙C�[�Ӻ����,�������ڵ�����r��.
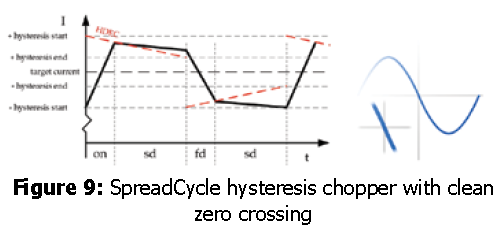
��Ⱥ㶨�Ĕز�ģʽ,TRINAMIC��SpreadCycle PWM�ز�ģʽ�����ٺͿ���˥�p��֮�g�Ԅ�����һ���Ŝ�˥�p����.ƽ��������������õ��������,�����ҵ��^���c�������F�^����,�@�͜p����������صIJ���,��������θ��ӽӽ����Ҳ�,��Ȃ��y�㶨�ز�ģʽ,SpreadCycle PWM�ز�ģʽ�����µ�늙C�\�е�Ҫƽ����ƽ���ܶ�.
�@һ�c��늙C���oֹ����ٵ������^���зdz���Ҫ.
���ʹ���M늙C���F��ȫ���o��?
�M�ܸ����ܽ�Q����r�µĵ��l����;���M���������PWM�ز�ģʽ����TRINAMIC��SpreadCycle�㷨,�@Щ��Ӳ���ϵ����úܴ�̶��Ϝp�����Ӻ��,�@Ҳ�M���˴ֵđ���,Ҳ�m�ϸ����\��.���ǻ���������ƵĔز�ģʽ,߀�Ǖ����ڿ� ��Ҋ�����������,��Ҫ������늙C��Ȧ�IJ�ͬ��,�z�y����ώ������{��������PWM�r���`��,�@Щ�����������һЩ�߶ˑ��È���Ҳ�Dz������S��,�����\�л������\�ӵđ���,�Լ��κβ����S�������͈���.
TRINAMIC��StealthChop�㷨Ҳ��ͨ�^Ӳ���팍�F��,�ĸ�����ʹ���M늙C�o��,����Stealthchop�������Ӱ��˲��M늙C?��ʲô늙C�������F����������?Stealthchop����һ�N�c�����������늉��{��ģʽ��SpeadCycle��ȫ��ͬ�ķ���.���Dz��û���늉��ز�ģʽһ�N�¼��g,ԓ���g���C��늙C���o����ƽ��ƽ���\��.
TMC5130-һ��С�w�e,���ɵIJ��M늙C�ӿ���оƬ,����StealthChopģʽ.TRINAMIC���M���{��ģʽ.��������Ƚ���������ӌ��ӑB���ܵ�Ӱ�,TMC5130���û����������������늉��{��,�@���Sϵ�y���m��늙C�ą������\��늉�.����ֱ��������ƻ�·�㷨�����С��ʎ������.
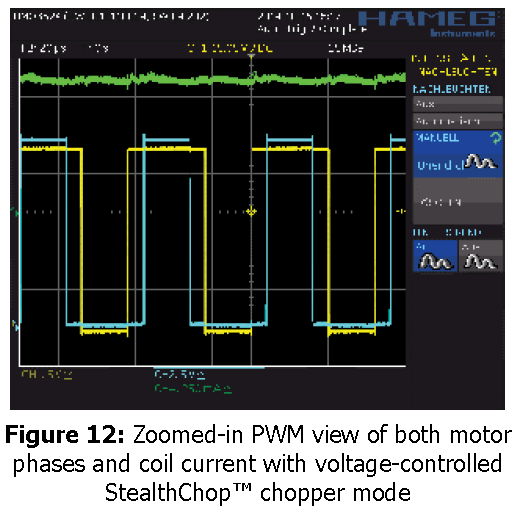
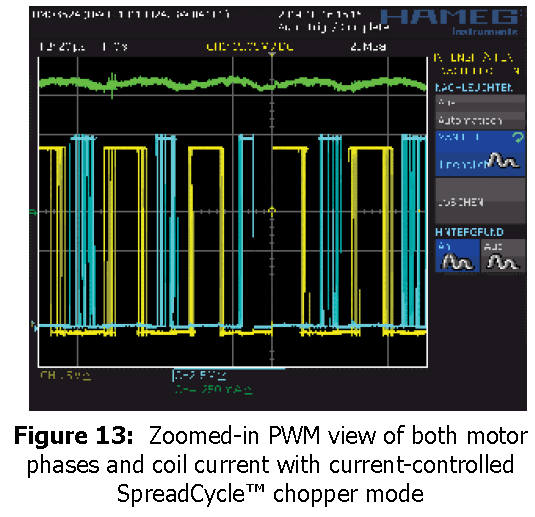
�D10�͈D11�@ʾ 늉�����ģʽ��Stealthchop ���������ģʽ��SpreadCycle
StealthChopģʽ���^���c��Ч���Ƿdz�������:���������̖����׃��ؓ����ؓ׃����,�������^�Ʌ^����dz��m�ԵĴ��^���c.���������{���Ǹ���PWMռ�ձȁ����Ƶ�.��50%��PWMռ�ձ�,�����0,StealthChop�{��PWM��ռ�ձȁ��{��늙C���,PWM�l���ǂ�����,�c���෴ ������ƵĔز���ͨ�^�{���l�ʌ��F�{��늙C���,���@�� ����IJ����DZ��^���,��������IJ��ӕ���늙C�������w�D����a���u��,�@������늙C�Ĺ��ēpʧ.
�@Щ�l��׃������PWM�l���������ڿ� ����֮�ȵ�,���l��˻˻����,������Ӷ��ӕ����ڴ�����s�a�����������,�M�������f����Cеϵ�y������.��StealthChop�Ĺ̶��ز��l�ʾͲ������@Щ���}.�]�Дز��l�ʵ�׃�� ����늙C�\�Еr���������������׃��.
����늙C�S�����ĥ������,�@�ǟo�������֮��,StealthChop������늙C�����ژO�ȵľ�����,���Ԍ��F����늙C����10dB��ؐ����,���������ڂ��y��������Ʒ�ʽ.�҂��������е�֪ 3dB��ؐ�Ĝp�������������̶Ƚ���һ��.
�����M늙C���f��׃��ʲô?
����M늙C߀��һ�Nʮ�ֽ�����늙C,�ѽ��������˺ܶ���,���f���ú�ԭ��һ�ӵIJ���,һ�ӵ����a������b�乤ˇ.
��������^ȥ,����M늙C�������εĿ��Ɔ�Ԫ��,�����M���㷨���߶ȼ��ɵ������ԭ����늙C�l�]������ĝ���.�ڽӽ�늙C�����·�и������Ϣ���@ȡ��̎�������r��������ﱻ̎���ԃ���늙C����,StealthChop����һ�����������������㷨��PWM�ز��o��ϵ,�����@Щ��Ϣ߀���Է��������ߵđ��ÿ��ƌ�,�����y�IJ��M�ӷ������dž����(�}�_/����),����TRINAMIC�����ܲ��M늙C�ӷ��������p��ͨӍ,�@Щ�ӿ�߀���ԱO�y��ͬ��B���\����Ϣ.�@��������ϵ�y�Ŀɿ���,�ṩϵ�y������.
StealthChop�o���Ӽ��g�dz��m��3D��ӡ��������CNC���߶˵�CCTV���w���\���O�䡢�t���z�y�O���Ȍ�����Ҫ�����еĈ���. |






